I tried to do this, a conveyor that doesnt really matter how fast it feeds. but the idea is that it will leave a battery above a tray, and then it will return the tray…i think im almost there, the problem is that i dont know why the robots wait for 2 or 3 trays to go to the sink conveyor…so what i want is just as it finishes, the robot goes right away to leave the last tray.
I tried with pull request, and different forms of the mission controller. so i know im a newbie, but i have tried for so much time and i still dont understand whats wrong
this is embarrassing, but i noticed the issue was that the collision avoidance was the one stopping the robots from moving. I disabled it and it worked.
but, now my second problem appeared. I cant alternate missions, i dont know why. i can run mission 1 without problem, or mission 3 without problem…but if i use triggers to alternate missions, then the robots stops
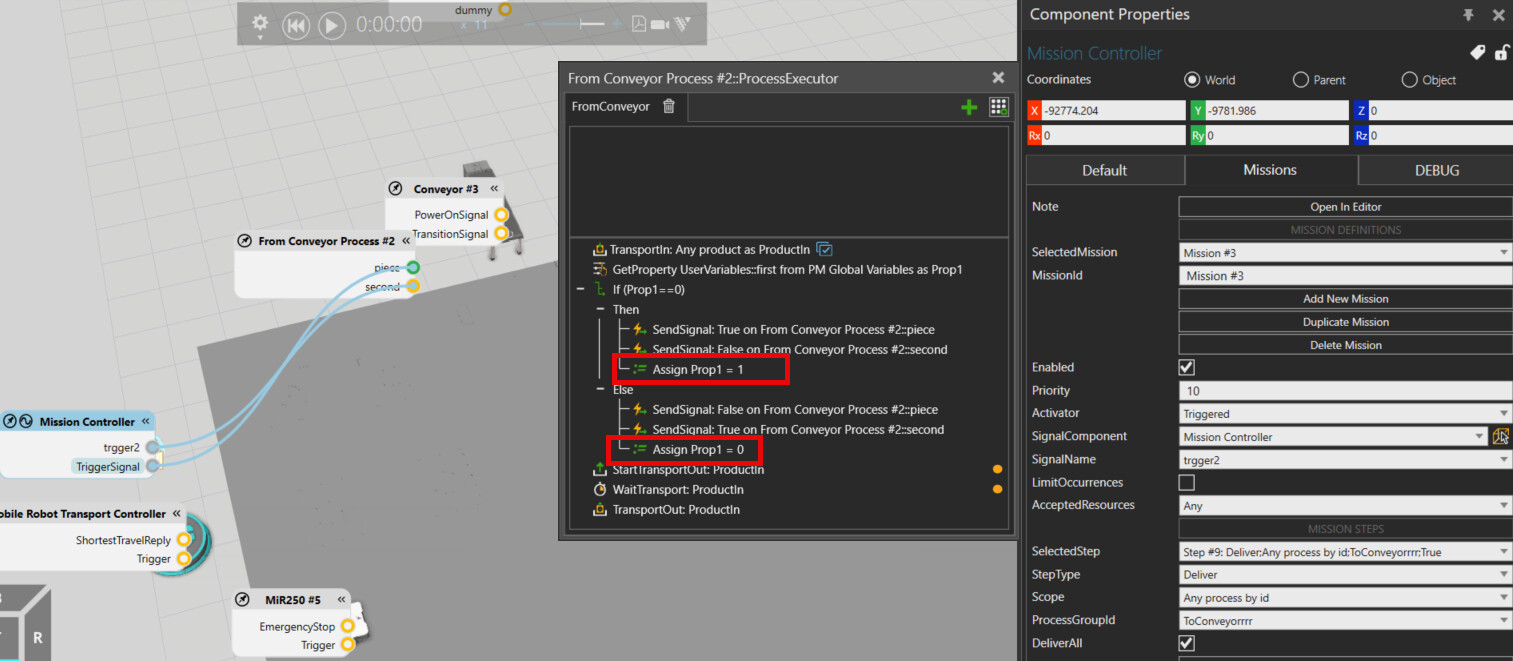
if I understand correctly, you are using a property from the component Global Variables to alternate between both triggers. But I haven’t seen anywhere where you change the value of this property.
If you use the Assign statement to change its value, then it will alternate each time :