Hello everyone,
Sr for my bad english, i’m kinda new to this software.
I would like to kinematize a pliers-gripper combination and then connect it to the robot arm. Problem is, i tried to define the axis 6 as parent to the tool so i can add the tool to the robot arm later on the program task but it seems not working that way, because man can only use snap-function on the tool to attach it to A6 and as result the tool becomes parent to the A6, but not the other way around. Can i change the parent status in the Python api ? And should i modify the gripper logic too, so that the tool can work properly? Thanks in advance!
Hey Leviathan,
You most likely can do this, by first going to the modelling tab (requires Professional or above) and then going to the correct interface.
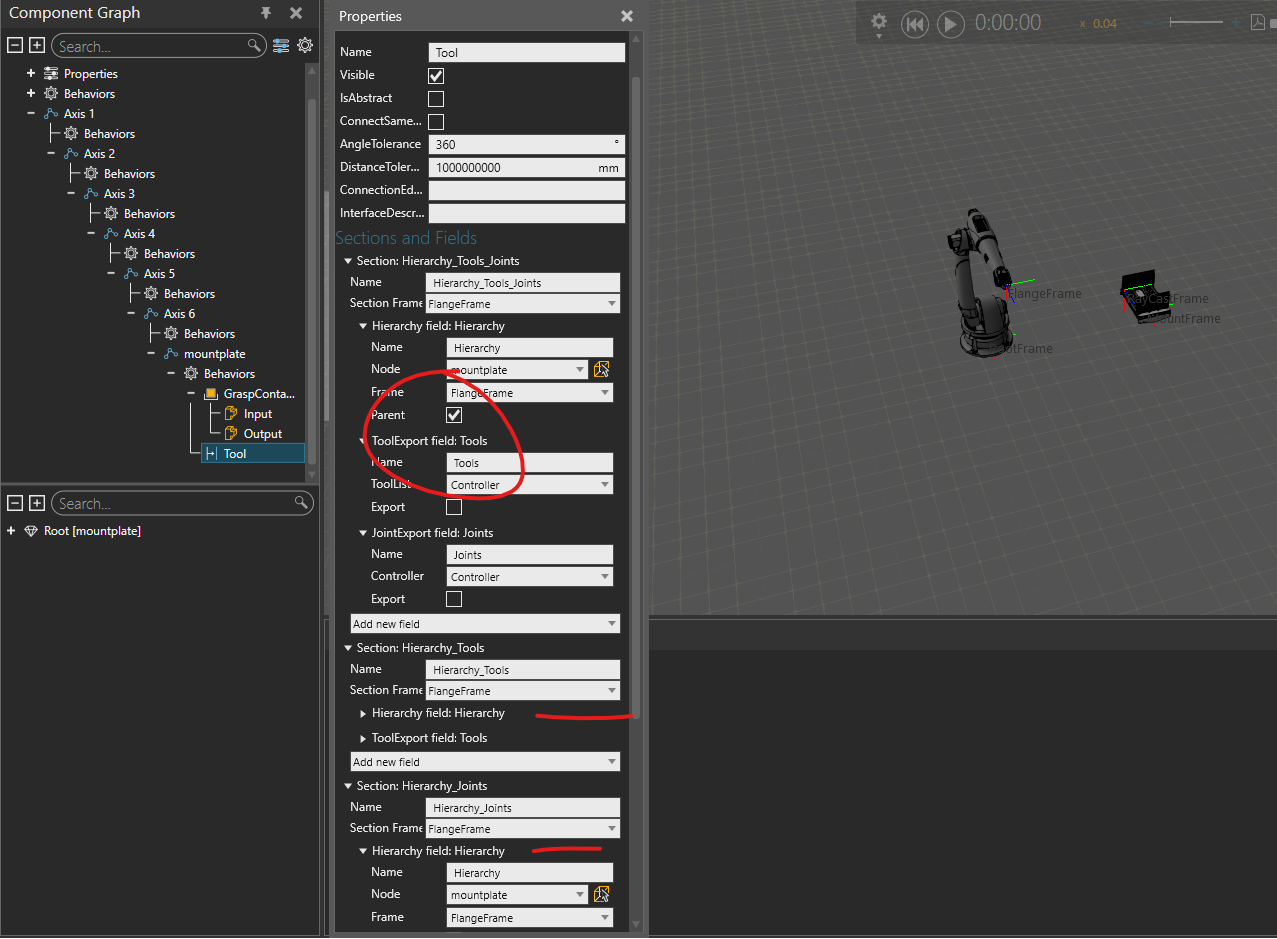
Here you could untick the “parent” tab, and then you go to the tool’s interface and tick parent on from there.
But what is the function of swapping the parents? The robot is “supposed” to be the master of the tool.
br,
Lefa
Tks for your reply,
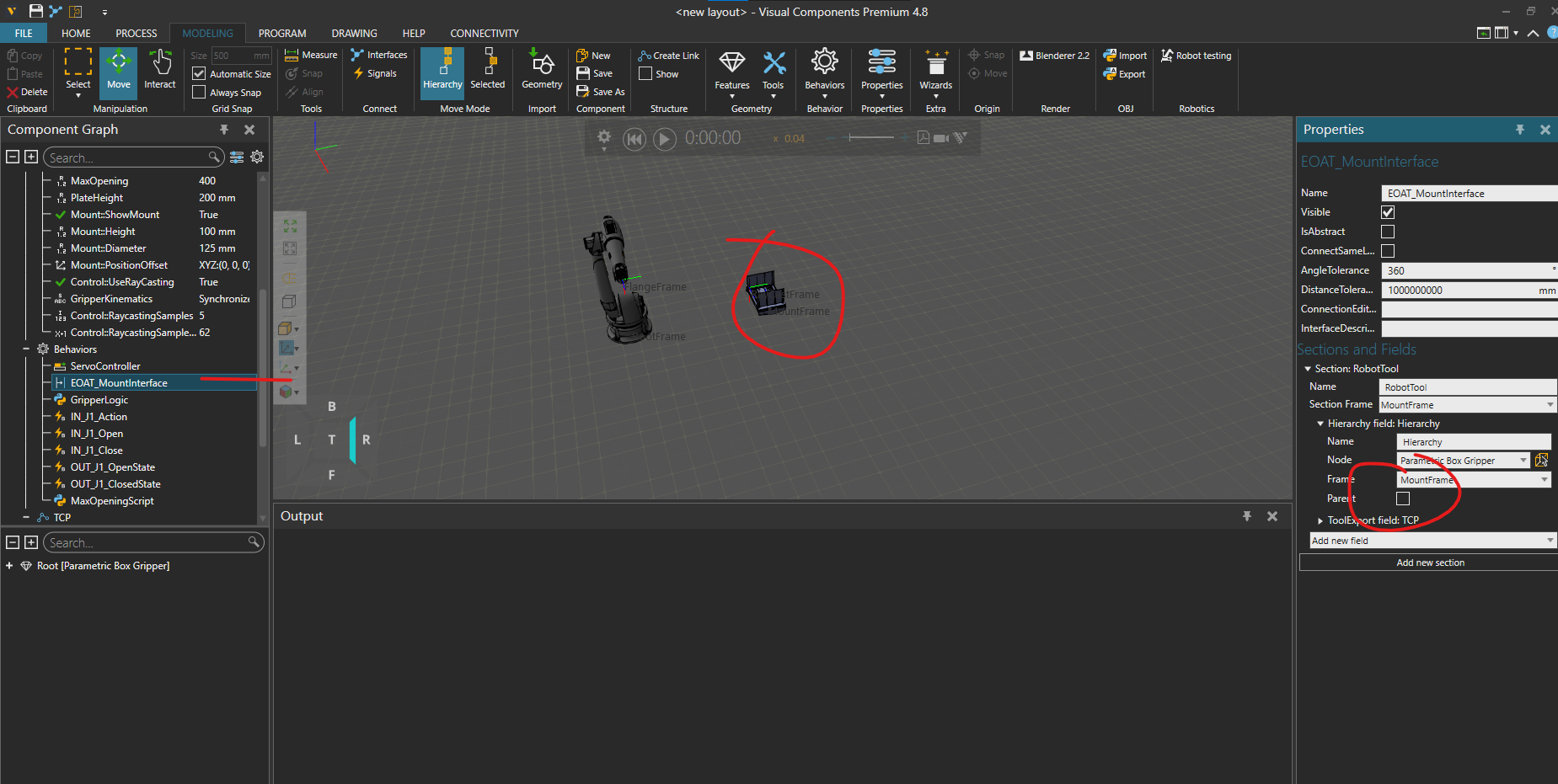
first I try to snap the tool to the A6 of the robot, then the window below showed me this
So I assumed that after this step the tool is defined as parent to Axis 6, although apparently the robot was defined as parent in “Sections and Fields”.
Then I tried to select the tool for the robot and this error showed up:
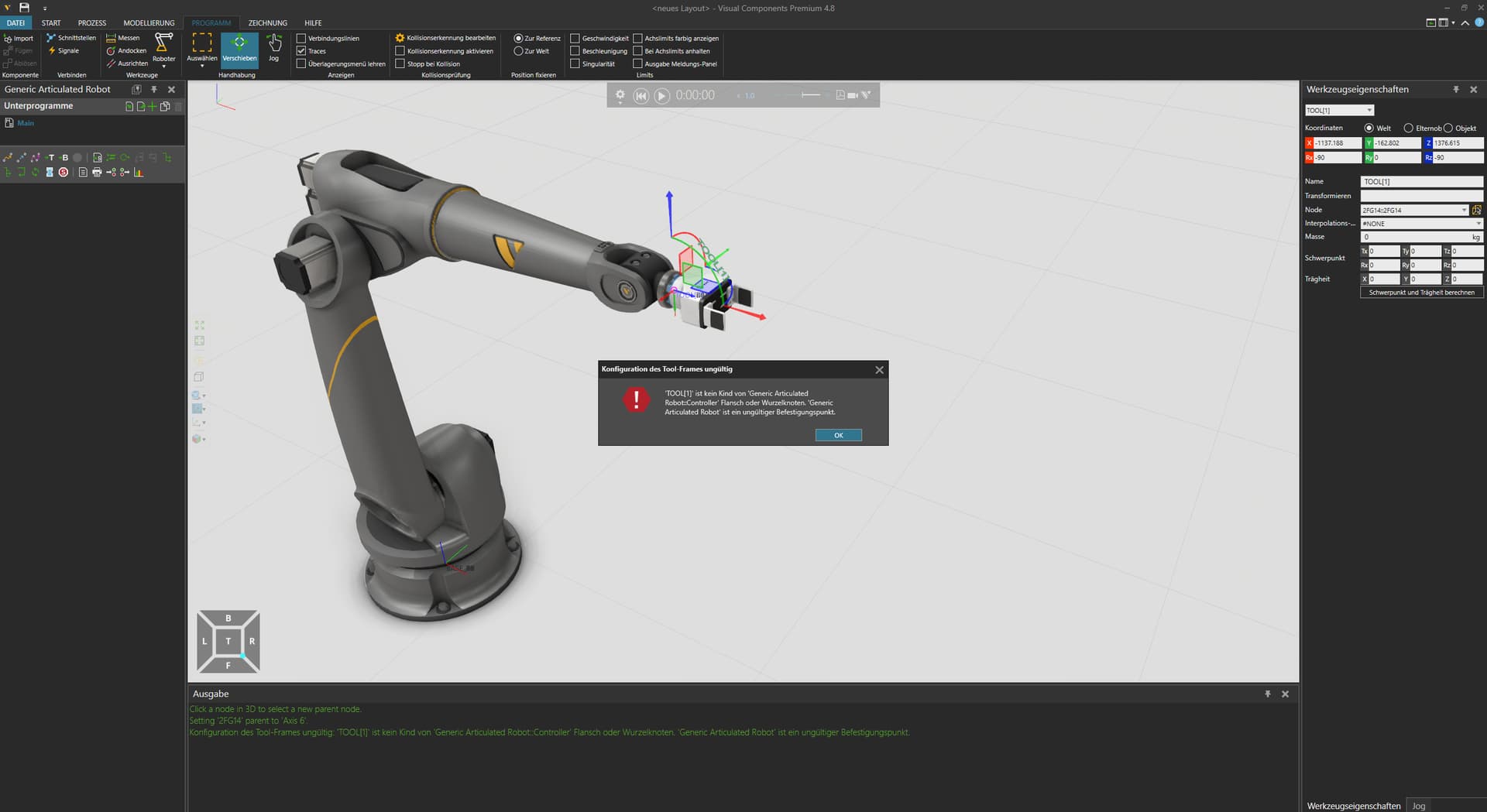
It said that the tool is not a child of robot’s flange or root. It seems that I can’t just snap the A6 and directly attach to the tool. If I snap the whole robot then connect to the tool, it will be attached to the root instead, as result when I move the robot’s joints, the tool stays still.
I think there are another ways to solve this problem out, like we can manipulate this parent status by changing something in the Python API, idk ![]()
BR
Ly
Hi,
That’s quite odd, you’re supposed to use the PnP tool and bring the tool towards the end effector of the robot and thats it.
br,
Lefa