Hi,
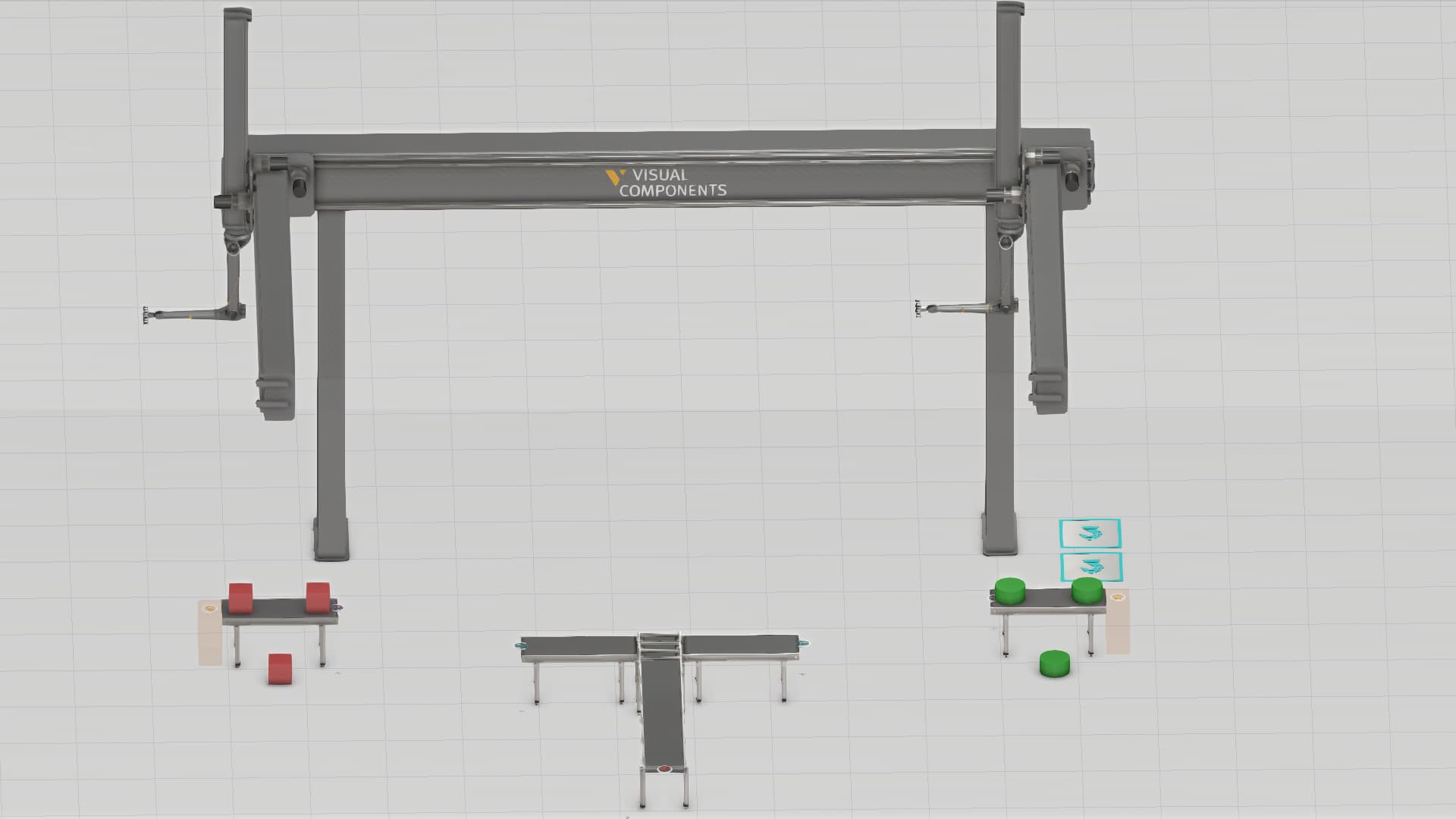
I’m trying to model a gantry system with multiple robots. So far I have model the gantry and setup a small test cell where I want to use the left robot to move red boxes to the middle and the right robot to move cylinders.
Are there any way to solve the problem with just a single robot controller or should I do one for each?
Furthermore, I would at a later stage like to add dynamic joint limits such that the two x-beams does not intersect.
Any ideas for how to approach these problems is greatly appreciated
MultirobotSetup.vcmx (1.9 MB)