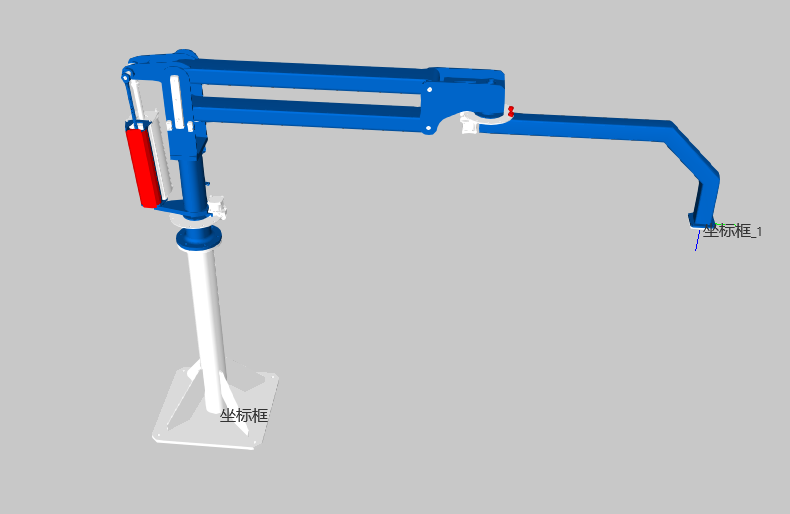
I’d like to consult with the experts: how can a kinematic algorithm model be established for this type of assistive arm structure? Could you please take a look?
9-Ra.vcmx (1.8 MB)
I’d like to consult with the experts: how can a kinematic algorithm model be established for this type of assistive arm structure? Could you please take a look?
9-Ra.vcmx (1.8 MB)
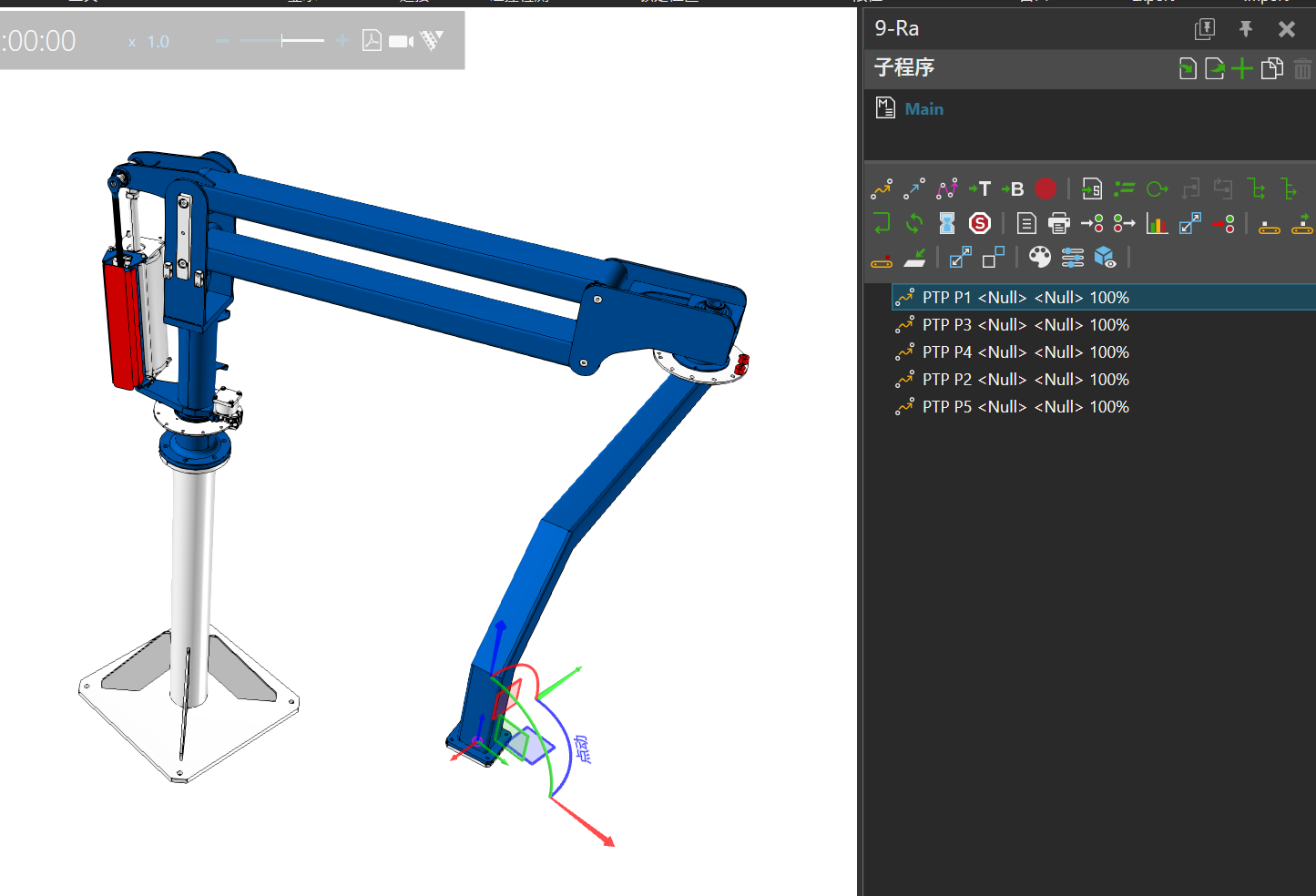
When switching configurations [“LEFTY”,“RIGHTY”], it is necessary to set all joint values to 0, otherwise problems may occur
9-Ra.vcmx (1.8 MB)
Oh my god, you’re my savior! Thank you so much for your help. Good luck to you!