hello!
I want the gripper to grasp the component link and make some action then release,
but I try to use Grasp action wizard and it only grasp the component not the link.
Does anyone know how to solve this problem?
Thanks
Hy,
I think grabbing always takes place on Component Level.
Why do you wanna grab a Link?
Regards
Feature
hi,I want the car to reach a certain position, and the machine will grasp its joints to simulate actions, (like the checking station),and then release the car to continue running along the track
Such manipulation of joints in another component would require either inverse kinematics or physics simulation. Neither is that simple to do.
Hy,
hmmm, is it possible to do this via Process Modelling?
If not Python Scripting with a concept behind would be necessary I think…
Regards
Feature
@captain_feature @TSy
Hi,
I don’t know how to make Process Modelling to achieve the functionality I want
As shown in the picture and file below, I would like the cylinder link module to rotate, but not the entire component.
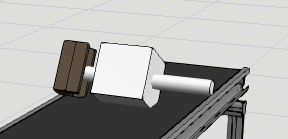
exercise.vcmx (238.8 KB)