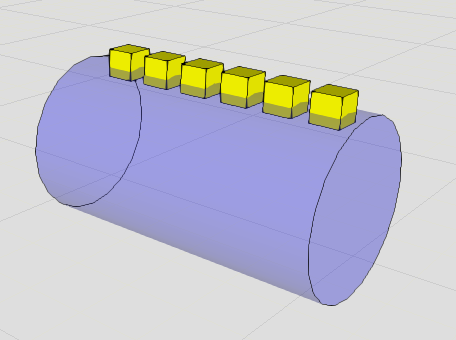
The current project my group is working on requires a human-operated trolley with a drum to be loaded with products. To do this, we wanted to use the assemblies feature to pick and place products on the drum. For this, the drum needs to rotate after 6 products are placed, but we can figure out how this can be done.
Should we look elsewhere for a solution, or can this be done with assemblies?
Here it would be best to have the products in different steps, or all the products from one face/side in one step.
If you attach your process to a rotating axis (either you model it yourself, or you could try with the “Rotational Axis” in the Signal Positioners in the eCat), you can use GetAssembly to load one Step/side, rotate your process (with a signal for example), then use GetAssembly again for the next step, then rotate again, and so on.
The process / rotating system could be attached to the trolleym and you can move the trolley using Missions, a bit like in the layout “Robot Resource On Trolley” from the “Layout Templates” in the eCat