Hi. So, I need to understand how to create a Bin Picking system similar to the one in this video:
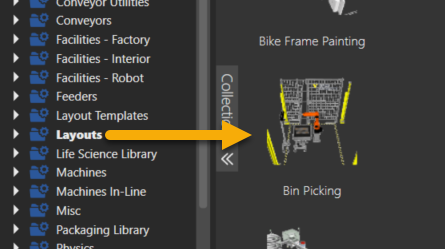
I know about the Bin Picking layout and I know it’s all programmed with Python, but I wish there was another way to do it or any tutorial explaining it step by step. Any feedback is welcome.
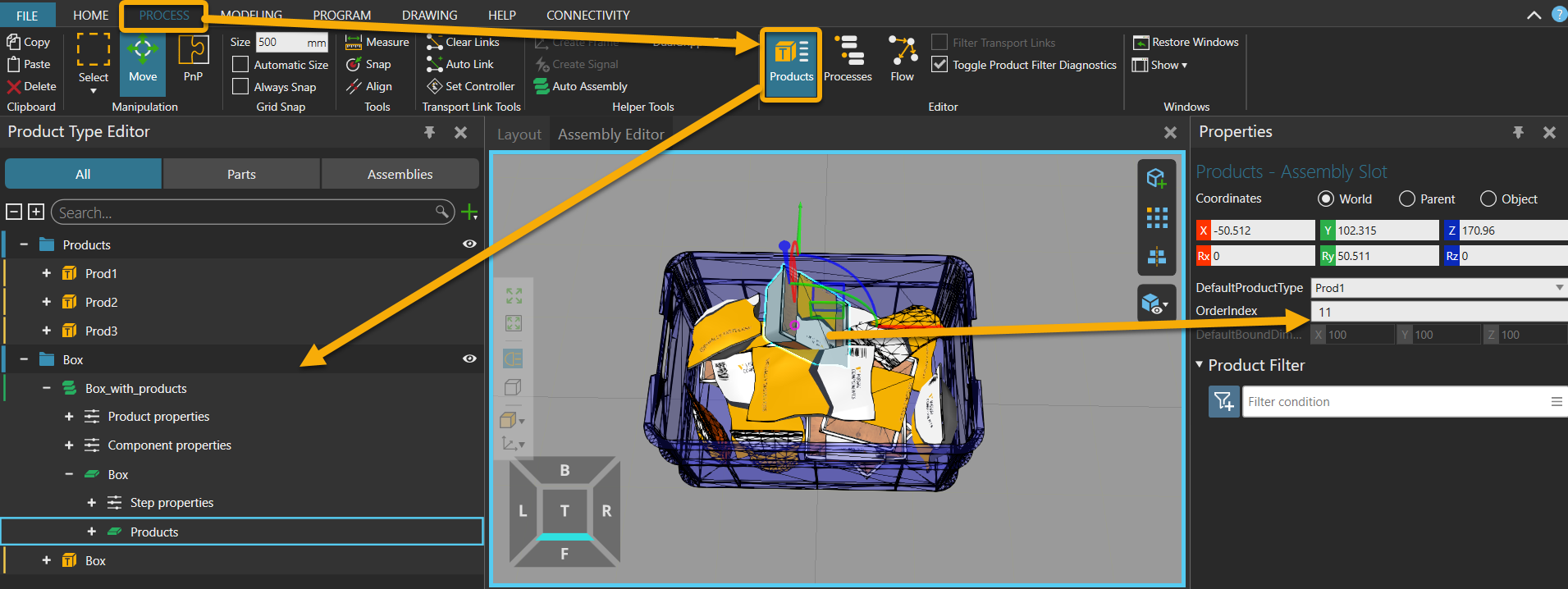
You can define an assembly in the ProductTypeEditor and place all your products in the same step. If you change their orientation, it can look like they are randomly placed in the box. Be careful with the OrderIndex, so that the robot picks the products on top first.
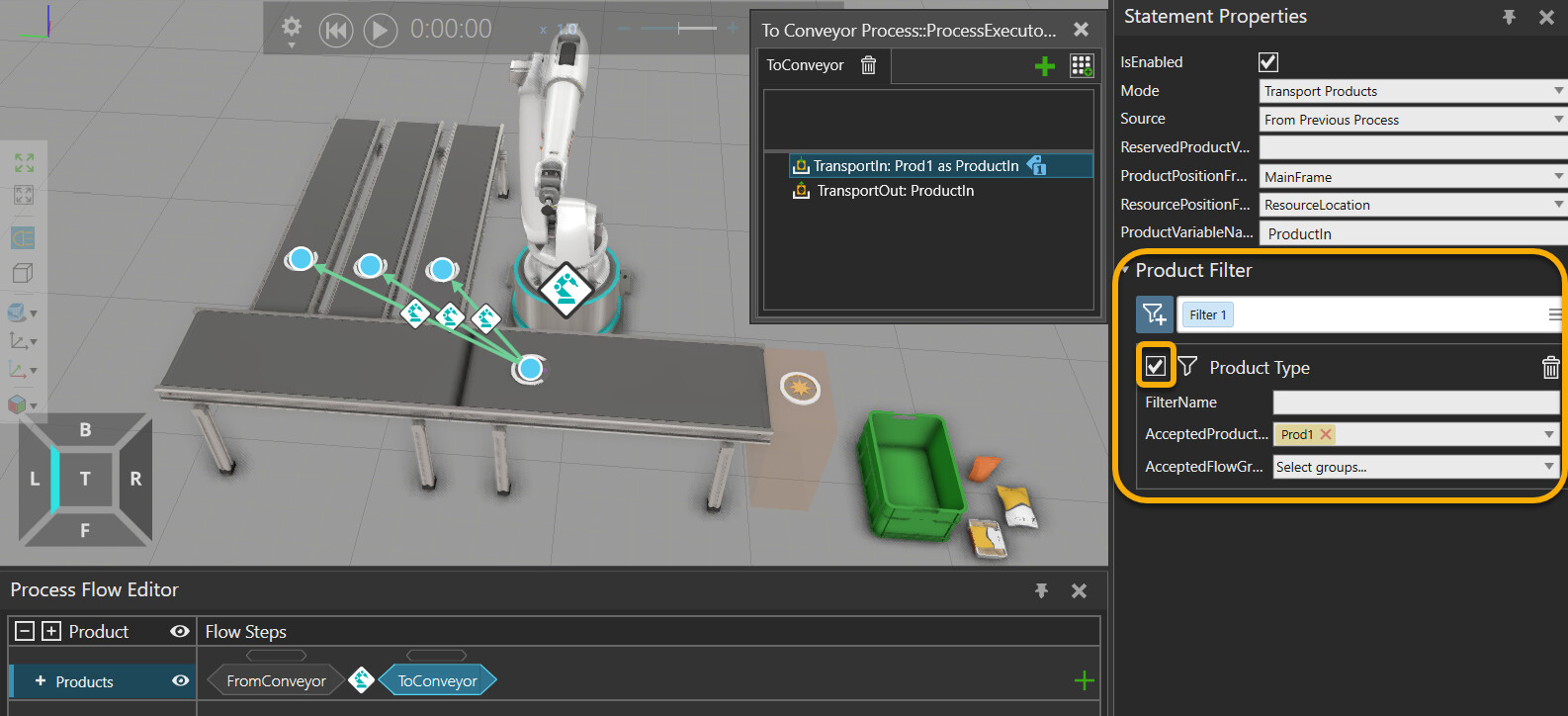
Then you can define which product goes on which conveyor with the Product Filter.
In my situation, I need to pick many tiny screws, so it is harder that way. Nevertheless, that is definitely a way that can be useful in some scenarios, I appreciate it.
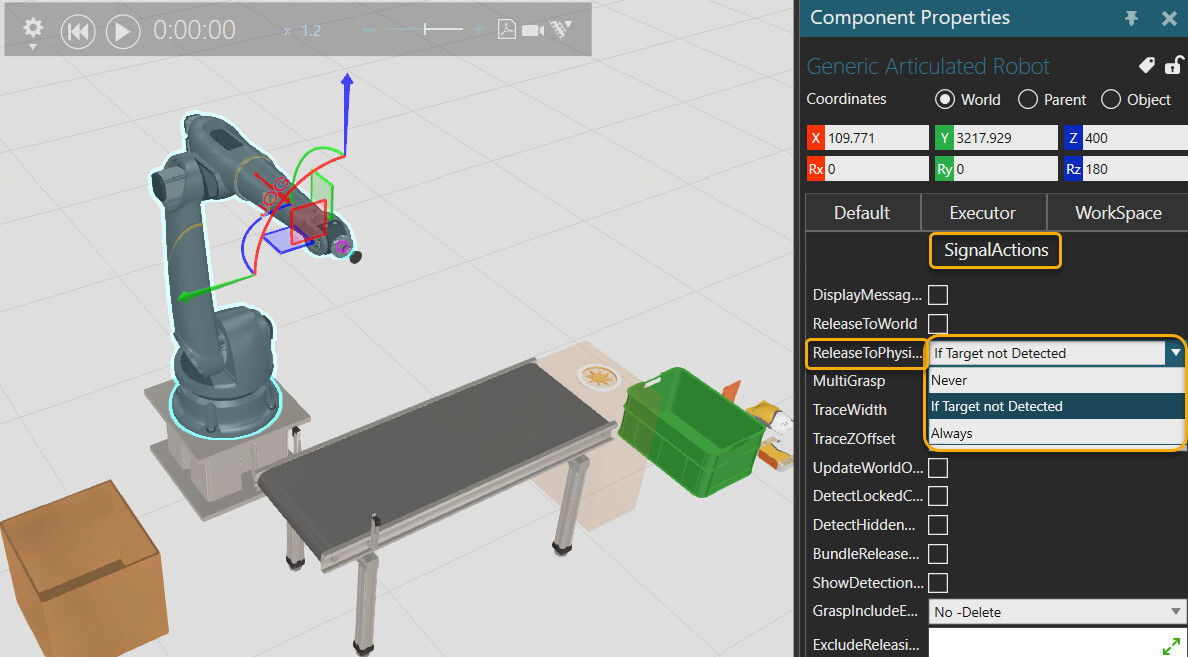
The Python Script is in the robot pedestal, but you don’t necessarily need to change it.
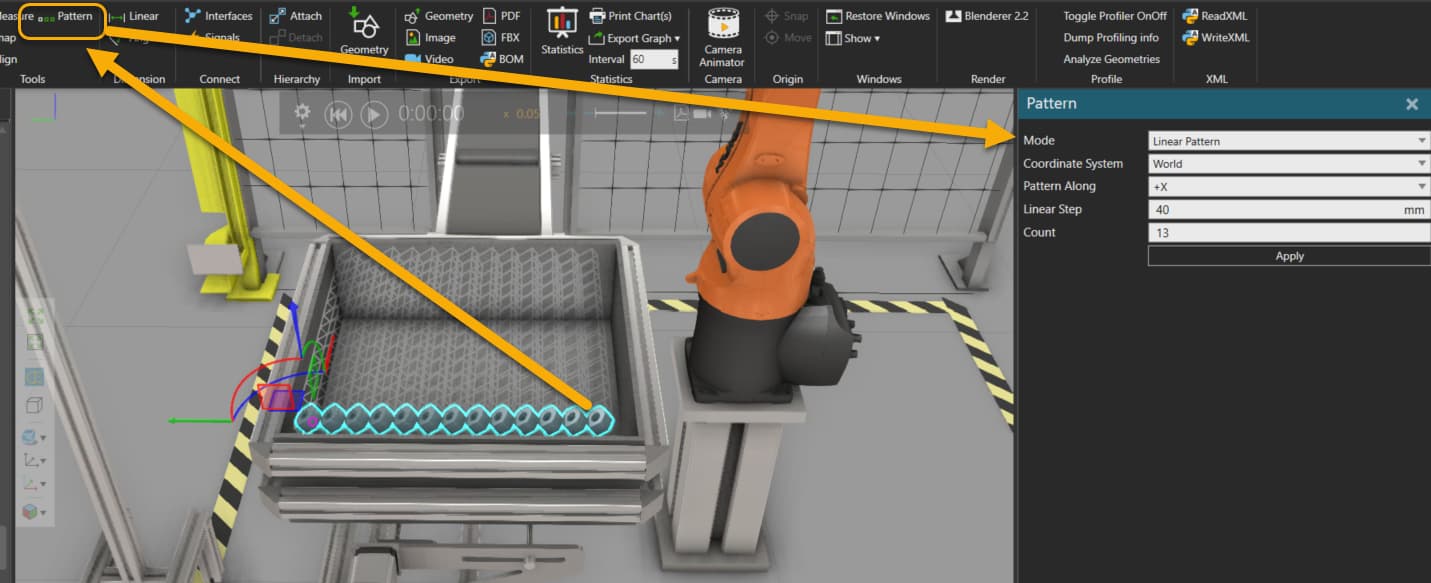
You can delete the rods and replace them with your components. Write “BINPICK” in front of your components name, place one on top of the box and use the Pattern function to create more of it.
When you begin the simulation, the Python script should add a Physics behaviour and pick frames to this products.
And if you don’t need precise physics but just that it looks a bit like the products are falling, you could still use Process modelling and fake it with an Interpolation transport. It’s a lot quicker and easier :
Since I’m using process modeling, I might go for that interpolation transport solution, even though it’s not perfect. Thank you once again for helping.