I think in VC you generally can’t stop nor change parameters of an ongoing servo or robot motion.
There might be some workarounds, but I haven’t done anything quite like your use case so I can’t really help you with the specific problem.
Some observations:
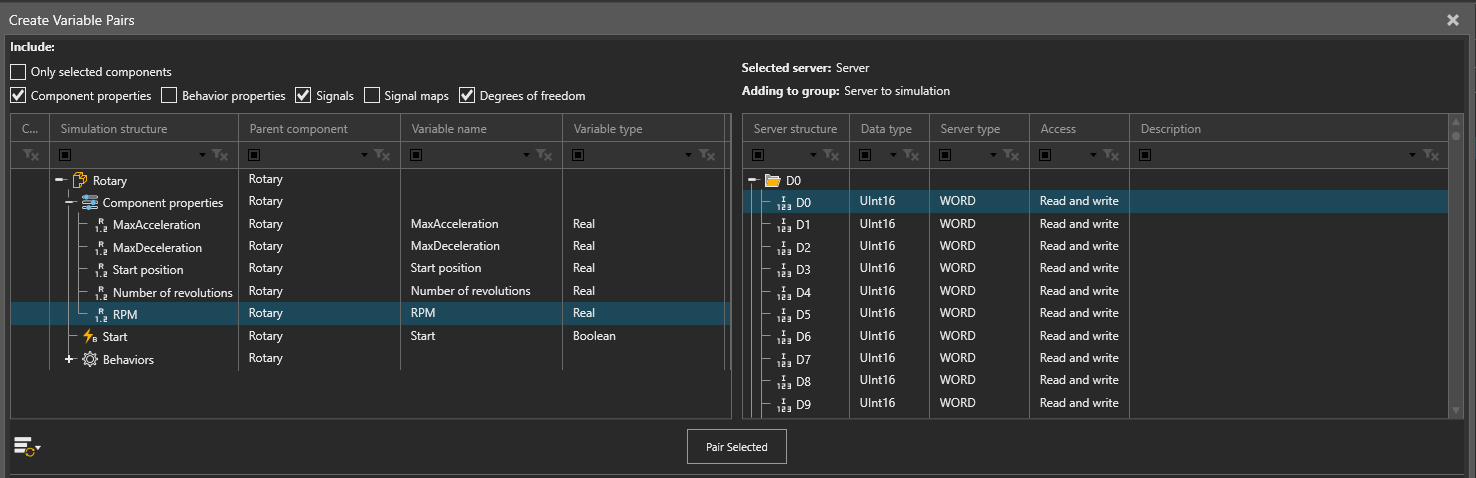
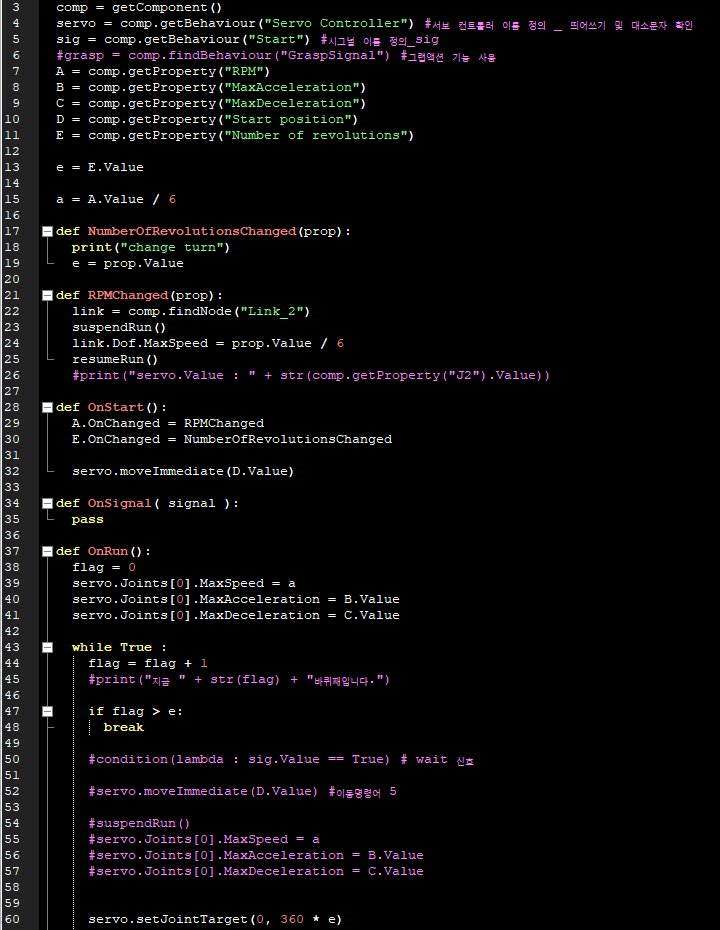
You could write the DOF properties such as MaxAcceleration and MaxSpeed directly from Connectivity.
Your “RPM” component property has the On value change: Rebuild option enabled. This will make setting the property value really slow because it rebuilds the component’s geometry.