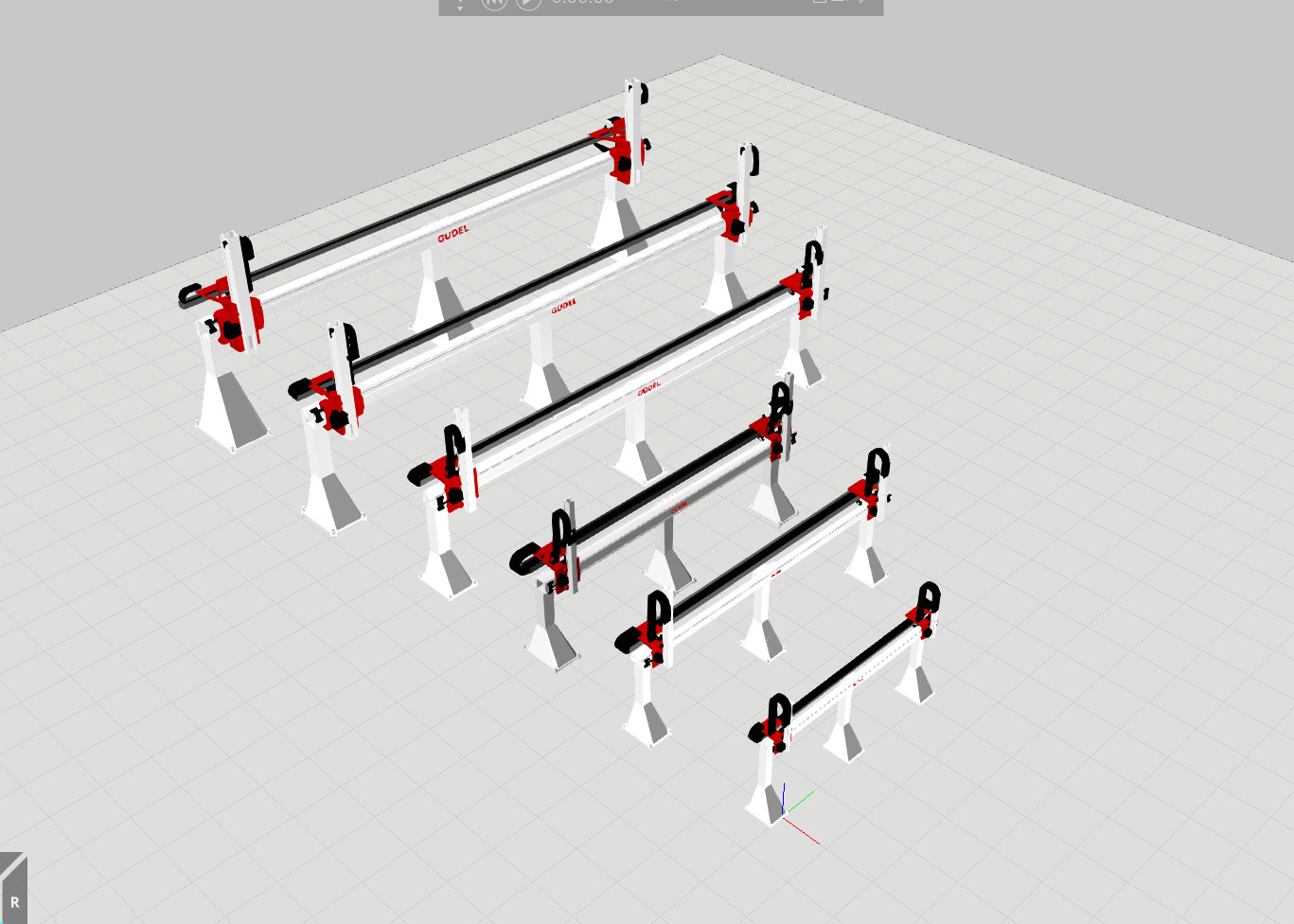
We’ve added Gudel Dual ZP robots to 4.10 eCat. There are 6 sizes in this family.
- Gudel ZP 2 (Dual)
- Gudel ZP 3 (Dual)
- Gudel ZP 4 (Dual)
- Gudel ZP 5 (Dual)
- Gudel ZP 6 (Dual)
- Gudel ZP 7 (Dual)
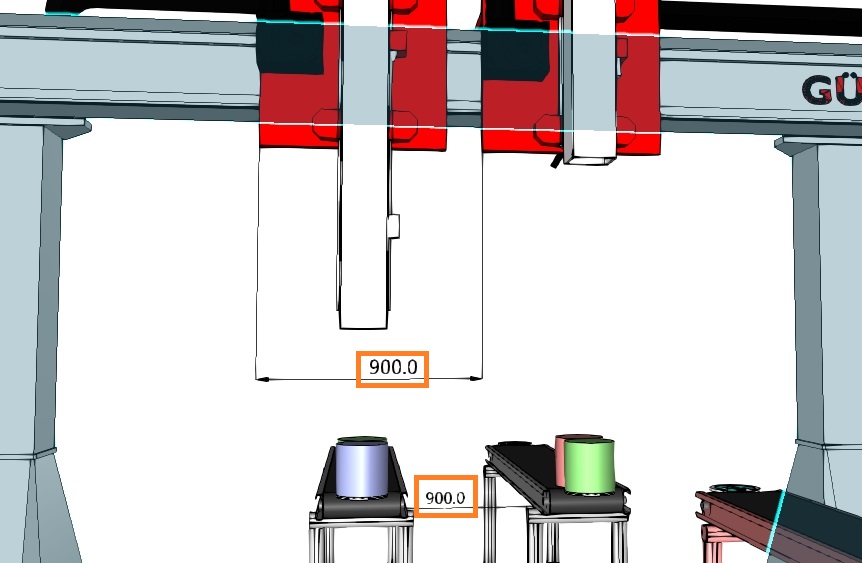
In manual programming these behave the same way as single ZP robots which we already had in eCat before. In process modeling the workflow is bit different. Dual ZP requires arms to work on shared workspace and our robot transport controller doesn’t have logic for that use case. So instead of using that there’s built-in transport controller in these Dual ZPs. It has some logic to allow arms to work on the same workspace without them colliding. Transports are made so that other arm moves to a wait position if it needs to make room for the arm that is performing the transport. Also there’s DualMode available and in that case Y-axes move in sync.
Here’s an example layout and video of Dual ZP used with process modeling.
Gudel Dual ZP Example.vcmx (1.0 MB)