Hi,
I have designed a multifunctional gripper, which means I can grasp multiple different parts with a single gripper design. However, I have a problem related to this. Is it possible to define multiple different Open/Close values for a single gripper and simulate those in realistic way (fingers actual opens/closes in simulation with separate values, e.g. closing 5mm for one part and 10mm for other part)?
Currently I have tried to define two separate servo controls for the gripper fingers and then used the End Effector Wizard. As a result I have been able to create those two separate Opening/Closing values with separate signals. The problem still is that I’m not able to use the signals as wanted because those are conflicting. How can I fix this issue?
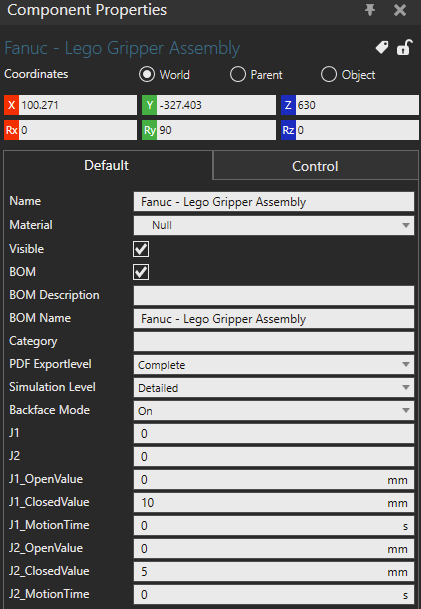
As a result, I hope that with one signal (e.g. 100) the fingers closes around 6 mm and with the other signal (e.g. 101) the fingers closes around 10 mm.
Is there someone who could help with this? I would highly appreciate an example solution if available!
And yes, I know that it’s also possible to use External Axis control to control the movements of the fingers but in this case I would like to figure out that is it possible to use signals to implement this functionality.
Br, saqu