Hi all,
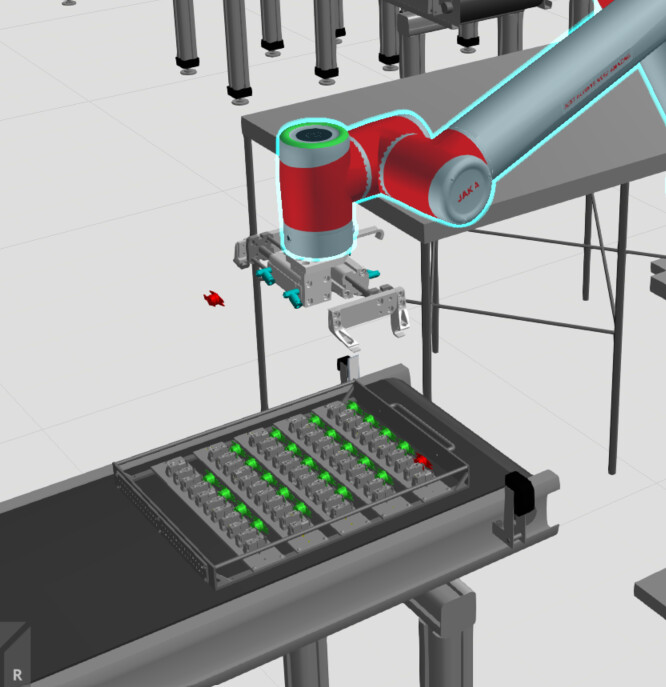
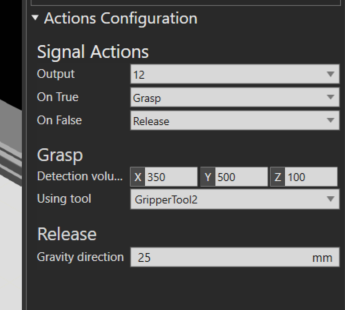
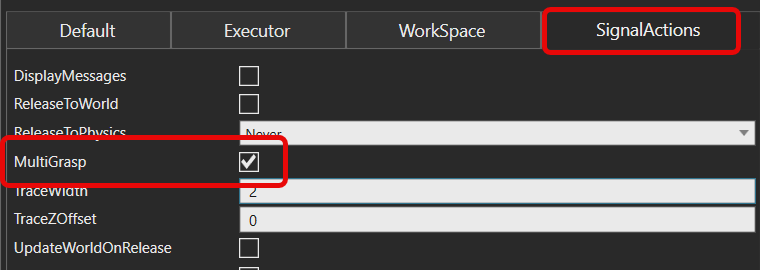
I have modeled the following gripper using the Visual Components tutorials for gripper modeling. However, the gripper does not seem to grip the entire pallet below it—it only detects one component. I have already increased the detection volume to cover the entire pallet in the Signal Actions.
Does anyone have any suggestions or experience with this issue?
Thanks in advance for your support!