Hi! First time trying to do something with robots. Guestion about the grasping and grasping multiple objects.
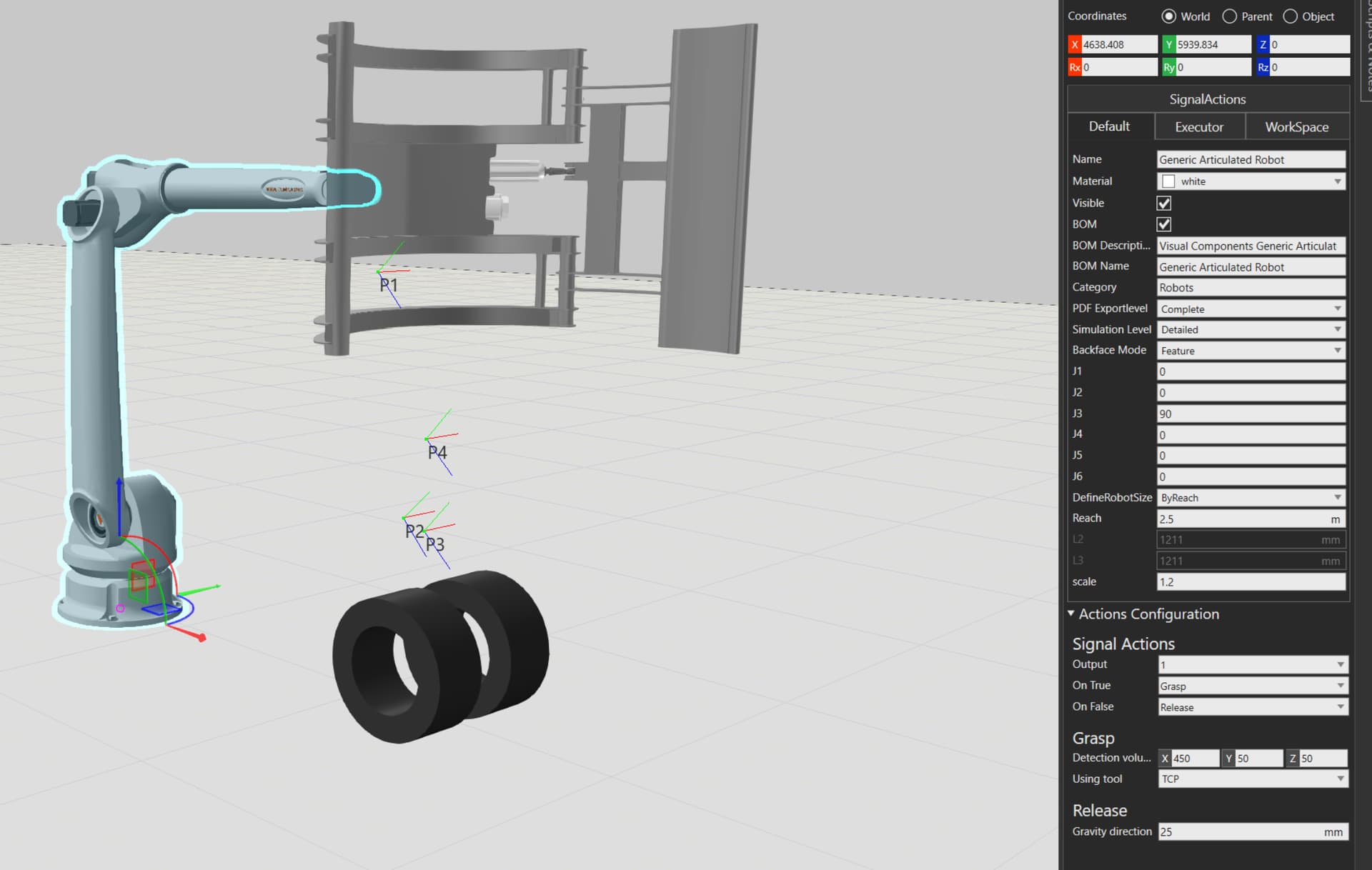
So I made this awesome grabber tool and tried to grab two cylinders with it. As you can see I increased the detection volume like was advised in the tutorials.
When I run the simulation happens next:
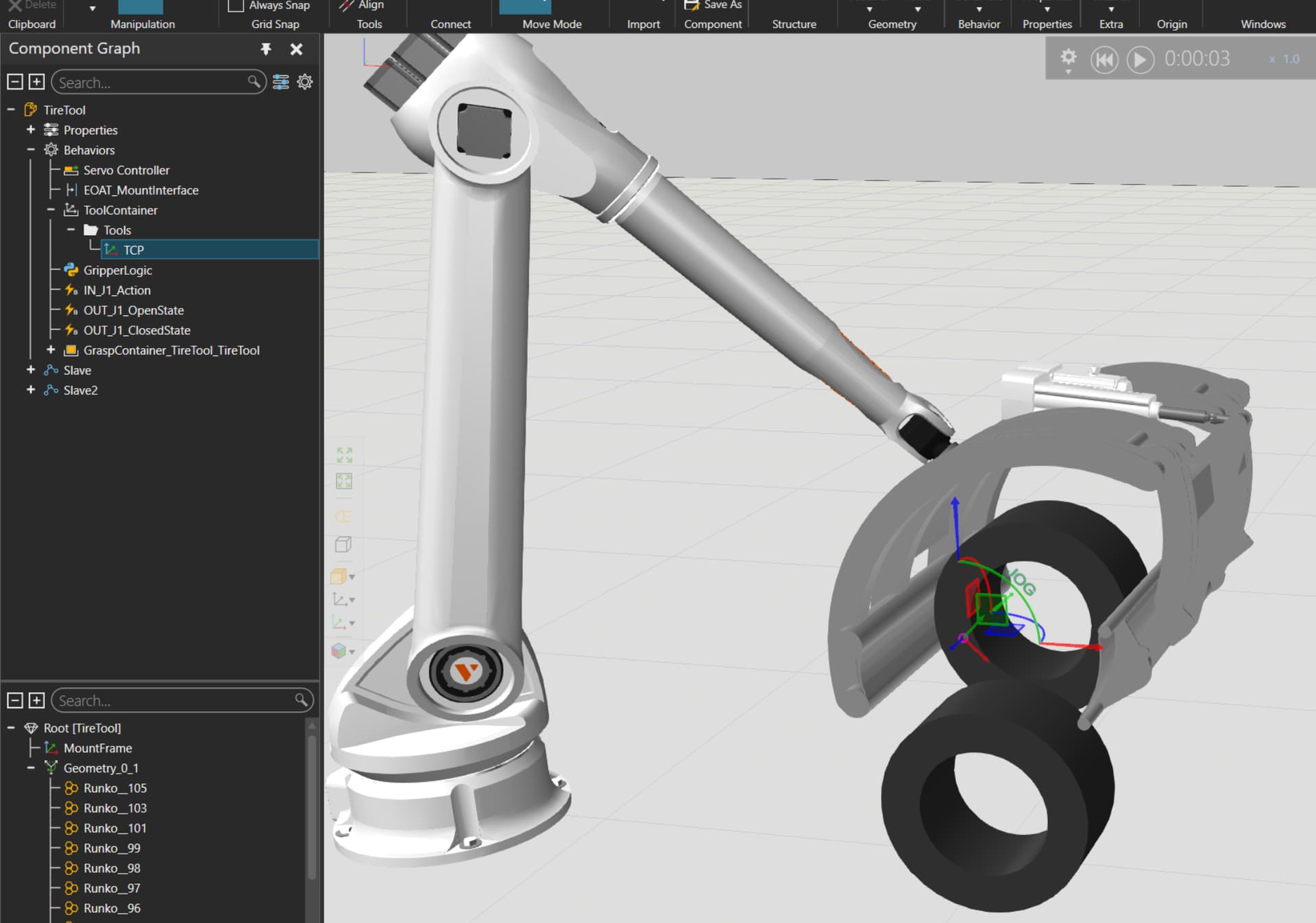
It only takes one of the tires.
I’ve tried to increase the size of the detection volume in each coordinate direction, but no luck. What do you think is wrong here. Using VC 4.3.
EDIT:
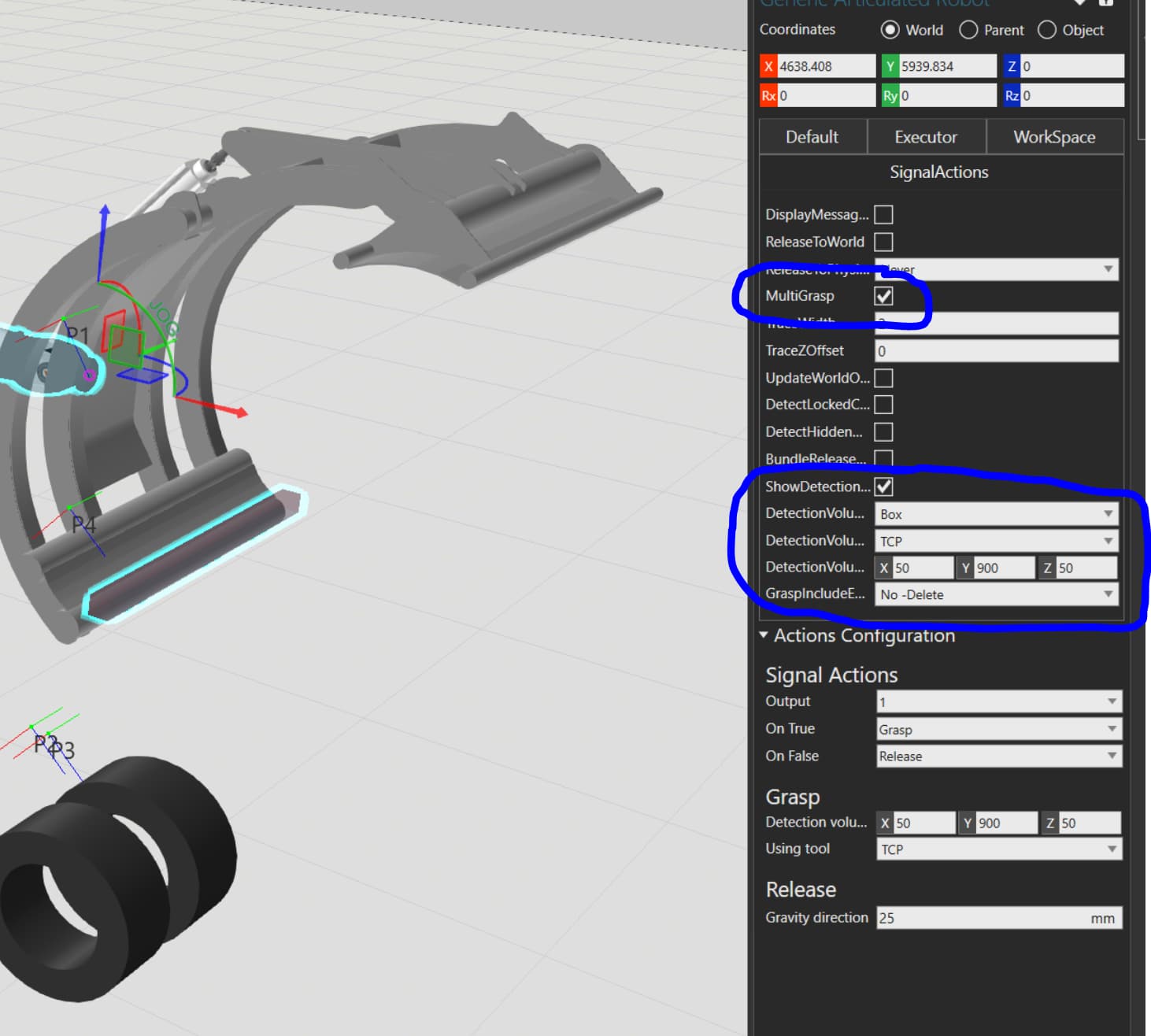
Found those in detection box size and multigrasp check boxes from signal actions and got it working ![]()