Hi VC Forum,
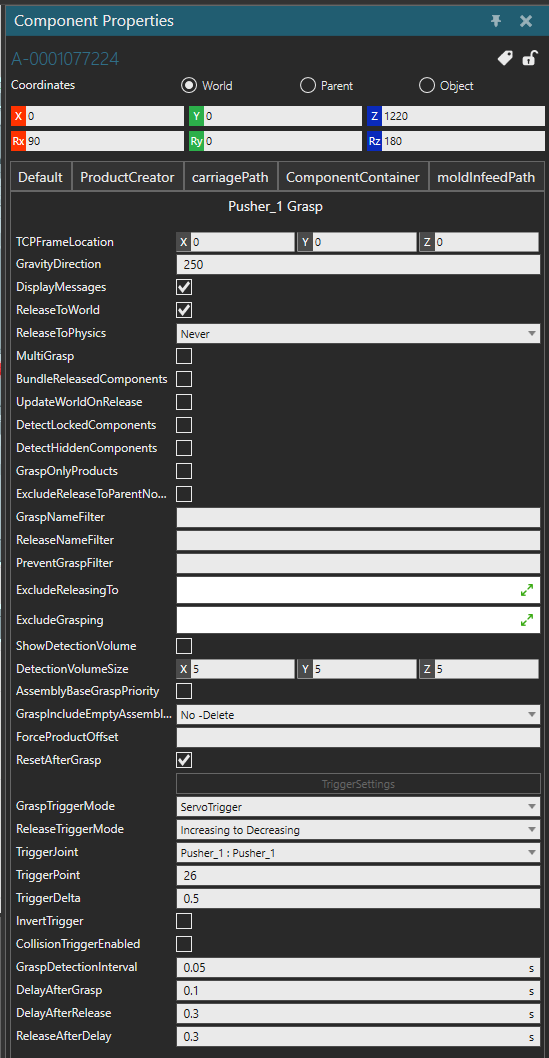
I’m a frequent user of the Grasp wizard and love its flexibility. Recently I have been working on a project where I need a pusher to push a product from a conveyor onto a carriage. In this operation the grasp wizard (pusher) grasps the product on the conveyor as it is supposed to. The ‘GraspTriggerMode’ is set to servo-trigger as the pusher always picks from the same position. The pusher then moves the product from the conveyor to a carriage where it is supposed to release the product to the carriage when it backs off again - but it does not. I have set the ReleaseTriggerMode to ‘Increasing to Decreasing‘ thinking that this would be optimal for this operation (grasping on a defined point and releasing whenever I set the pusher in reverse). I have tried to print different stuff in the grasping script and it seems like it never evaluates the servo-position when it is supposed to.
Is this something others have been experiencing and/or have a fix to?
I have attached a screenshot of the setup + the version of grasp script I have been using.
GraspWizard2.zip (16.5 KB)