I’m trying to Grasp and move a cylinder which has been placed by a robot. Here I’m encountering 2 problems:
I’m trying to trigger the Grasp() function through setting the grasp_signal to True in my PythonScript. Does anyone know why this doesn’t work? (I’ve commented this line in the PythonScript to work-around this and test the Grasp() function)
When I activate the Grasp() function it doesn’t detect the Cylinder even though the TCP is inside the Cylinder. Does anyone know what the problem is?
Please find my set-up attached.
Hopefully someone can assist on one of these questions.
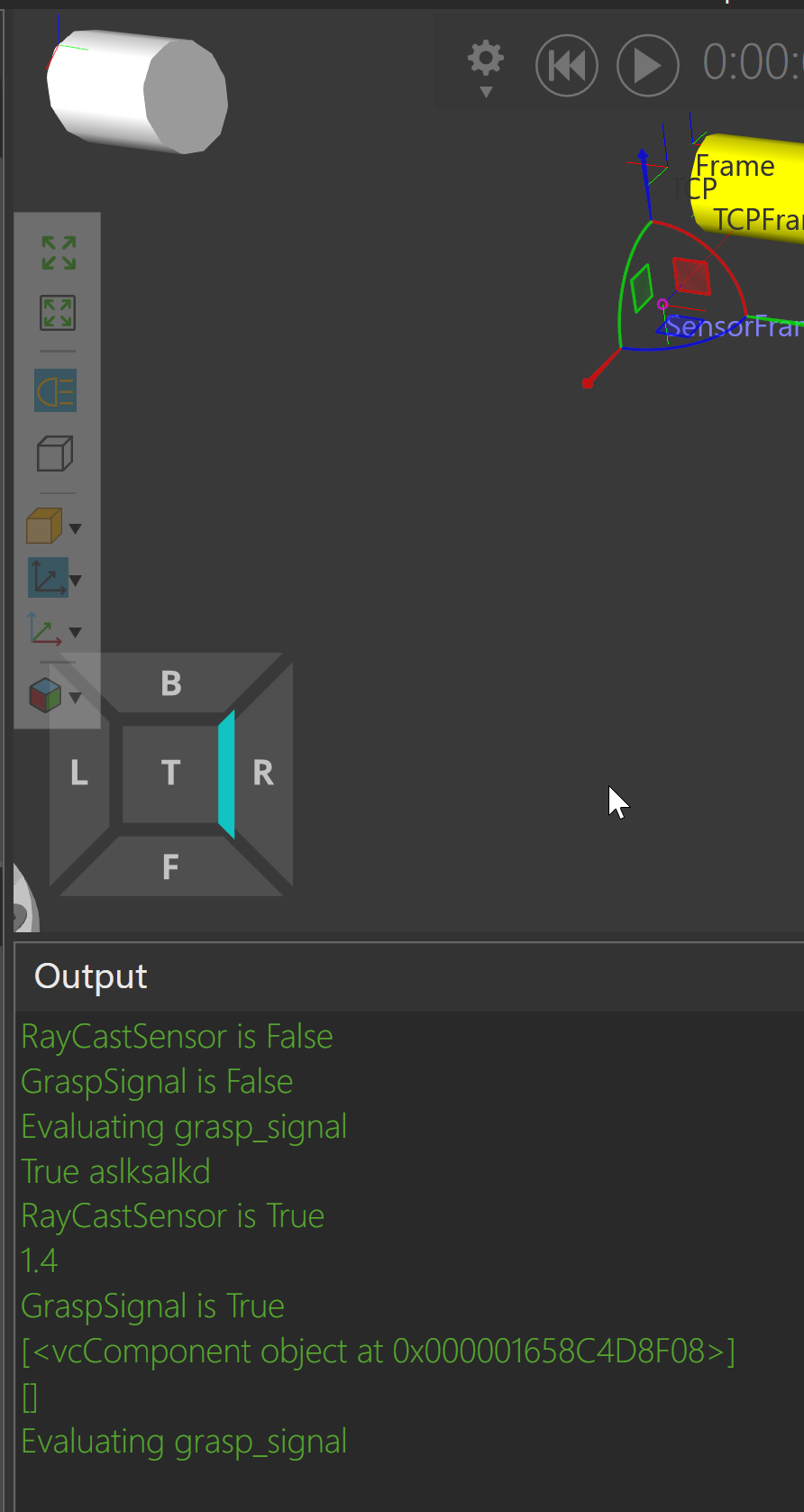
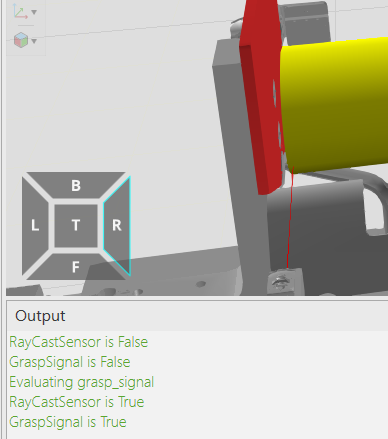
First, it’s interesting that you found that the Raycast sensor didn’t detect the cylinder because when I download the .vcmx file and open it, it does detect the cylinder. See image below. My VC version is 4.5.0.1 with Delfoi Robotics Software.
Second, thank you for the advise on using grasp_signal.signal(True), I wasn’t aware of this but it makes sense!
Third, I adjusted the items as you mentioned but this didn’t seem to make it work completely. It wouldn’t Grasp the cylinder and when I moved the Joint the Cylinder wouldn’t move.
I found that when I adjusted the radius of the cylinder to 25 mm and introduced a delay(0.1) in the GraspActionScript it does work. See attached file. I feel like it might have something to with where the cylinder is attached to, after being released by the robot, and the location & detection volume at the TCP. Would you agree?