Hi there!
I just got my hands on this amazing software and are trying to learn it through the youtube videos.
I tried to follow the instructions on the “Grasp and Release Multiple Objects” lesson but got stuck at 15 minutes. When my robot performs the grasp it picks up all three objects at the same time (it’s a small win!), but at the same time it also picks up the product batcher conveyor… I’ve tried to figure out what i might have done wrong or what settings to change, but i can’t really find an answere, thats why I’m turning to you guys!
My version of the software is 4.0.5(64-bit)
Long story short, try a smaller X-axis value for the detection volume size.
<hr />
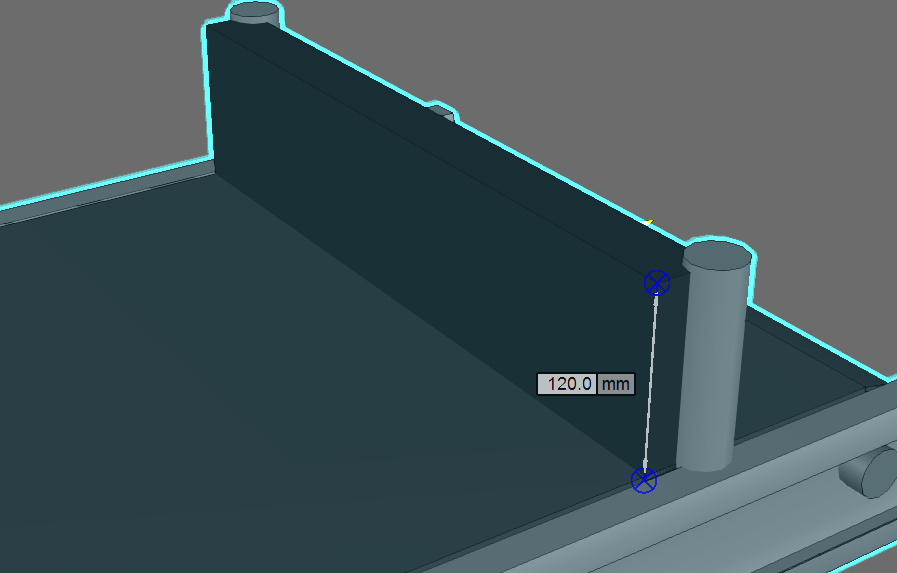
Watch the rest of that section in the video and ask yourself what the Detection Volume Size property and its XYZ properties are doing?
They are defining a volume used for detecting components. The volume is made using a tool frame and its coordinate system.
So if something below the parts is being picked… the Z-axis or height of the volume is too big. If something to the side of the parts like the batcher block on the conveyor… the X and/or Y-axis of the volume is too wide or long.
On the Academy, it shows that the tutorial was made using 4.0.0… wowzah!
My guess is the X-axis/length of the detection volume size is too big, so it is detecting the batcher block. I believe this might apply to both old and new versions of that conveyor.
At least the new one has a higher block, so try an X-axis value of 150 as shown in the video or switch the components. For example, I got the final layout from the lesson files in the Academy, and then switched out the old 4.0.0 version components with 4.1.1 and then made a new robot program using signals 100 onward.
If you want, attach your layout and I can quickly spot the issue.
4.1.1-Grasp-and-Release-Multiple-Objects-Final.vcmx (240 KB)
Thanks for the quick reply!
I tried to change the area of detection for the object being grasped but then i got either the conveyor or nothing… But by staying strong I finally figuered out that i managed to mess up the snapping of TOOL[1], so the coordinatesystem beign used was the problem. When i changed back to the Double gripper tool (or what it name is…) it worked out fine!
But i come up with another question. At the end of the video he just keeps it going but the program is’nt runned again. Is there some neat way to make it so that it contiues? It worked by making it a While-loop, but i thought it might be an simpler way to do it.
Okay. Be careful when snapping that the Orientation option is selected in Snap task pane, otherwise you would just snap the location. You can also change the snap to Frame, etc. to only select coordinate systems/frames like a tool frame. In most cases, always check that the Z-axis of the tool frame is pointing down or the direction that the gripper is facing down.
The tutorial is just about grasp and release not looping, so that’s why it is not covered. You could use a While loop, but a “simpler way” is to go to the Component Properties of robot, click the Executor tab, and then select the IsLooping checkbox. That will loop the robot program.
Your next question is probably how to make the batch conveyor receive more parts. Refer to the attached layout, which is the same layout I attached earlier, but with the IsLooping checkbox active, and a new Set Output signal in robot that sets the StartStop signal of the batch conveyor to True.
4.1.1-Looping-Grasp-and-Release-Multiple-Objects-Final.vcmx (237 KB)