I’m sorry I am new for visual components.
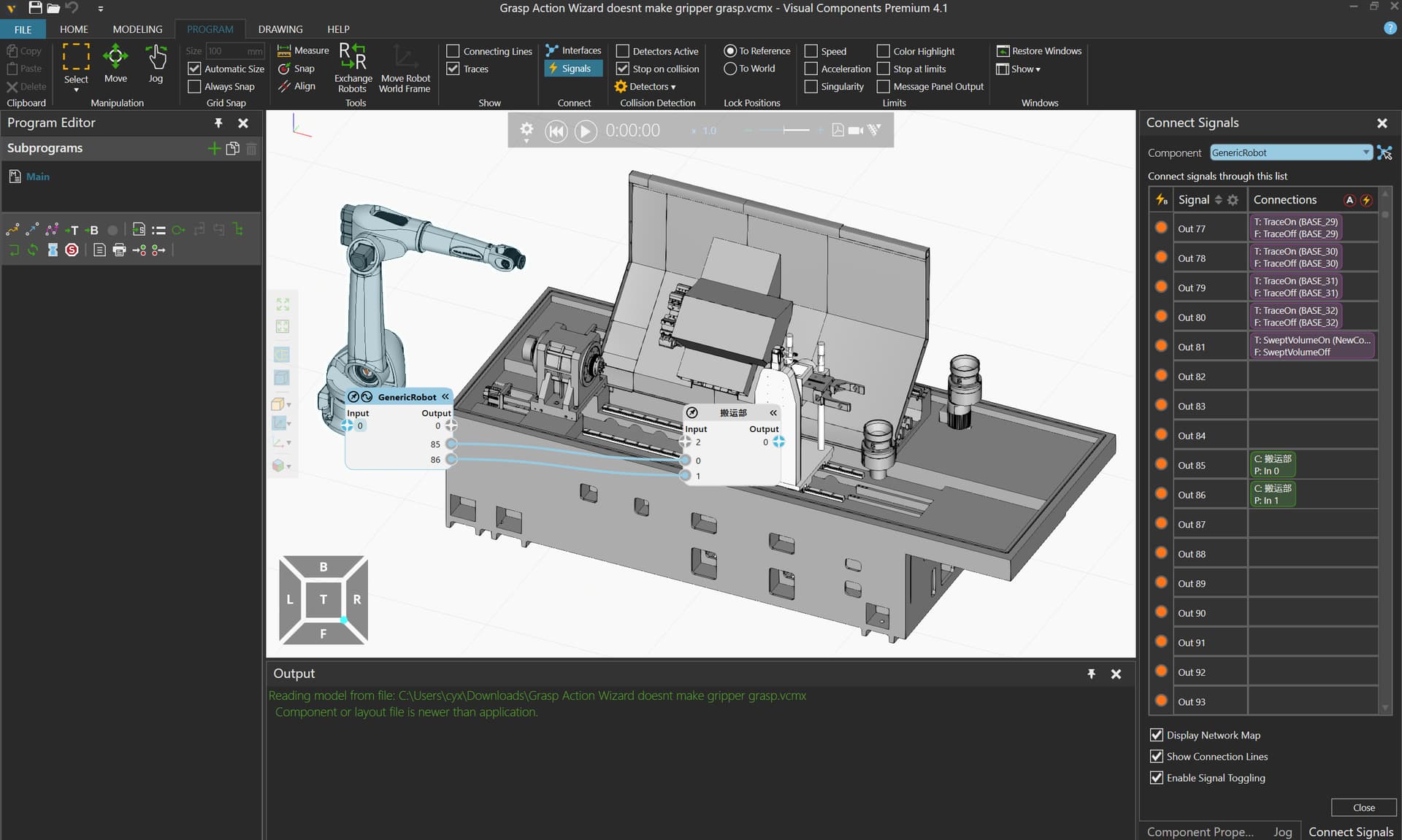
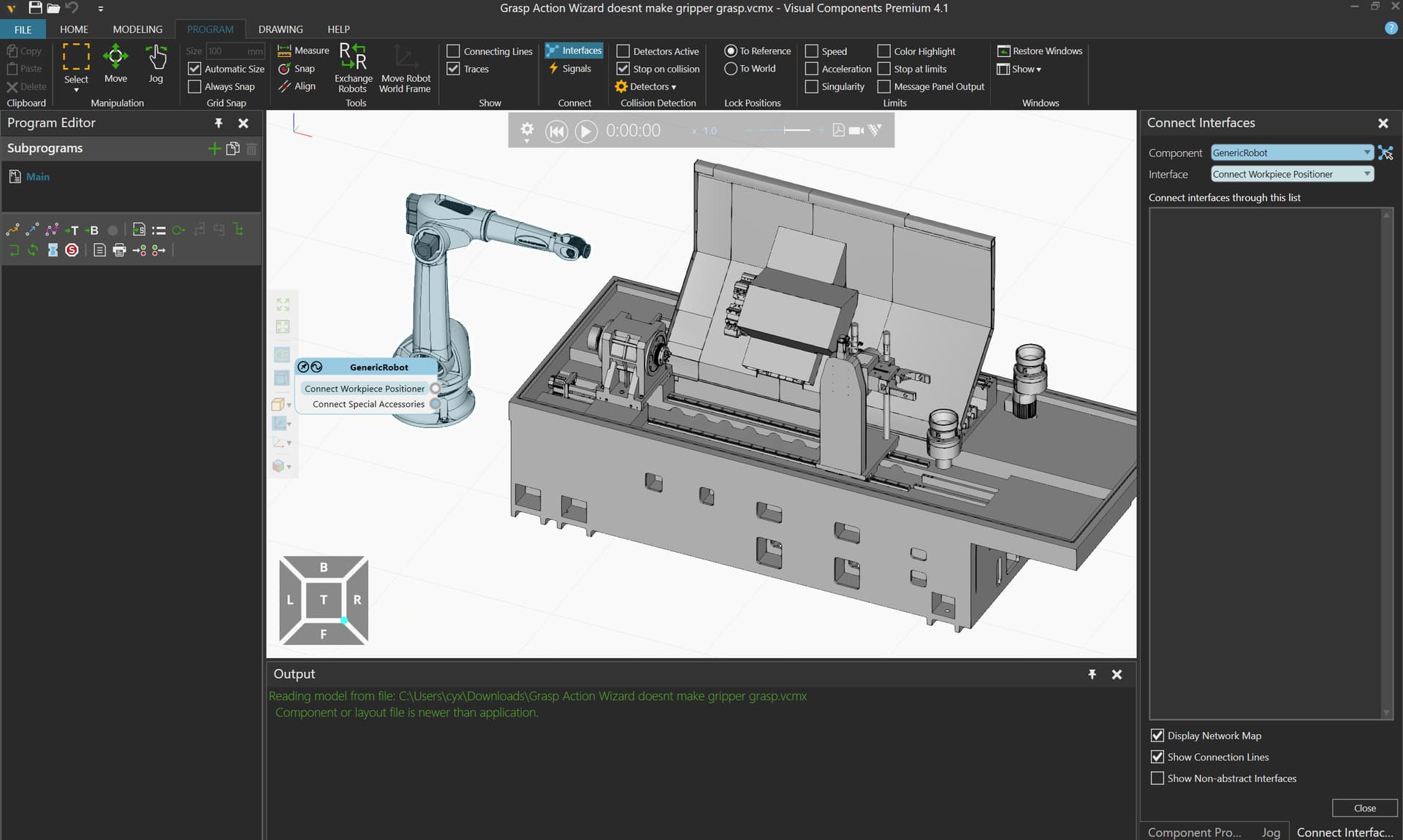
I connected the signal between robot and the carrier part, but I can’t connect the interface between them, because only one panel shows up.
Please cover more detail, thanks a lot!

hi,bro.First of all, thank you very much for your script, it was very helpful to me. But when I make a push rod to push the object, its jog frame and tool frame do not match. How to adjust the match between the jog frame and the tool frame?
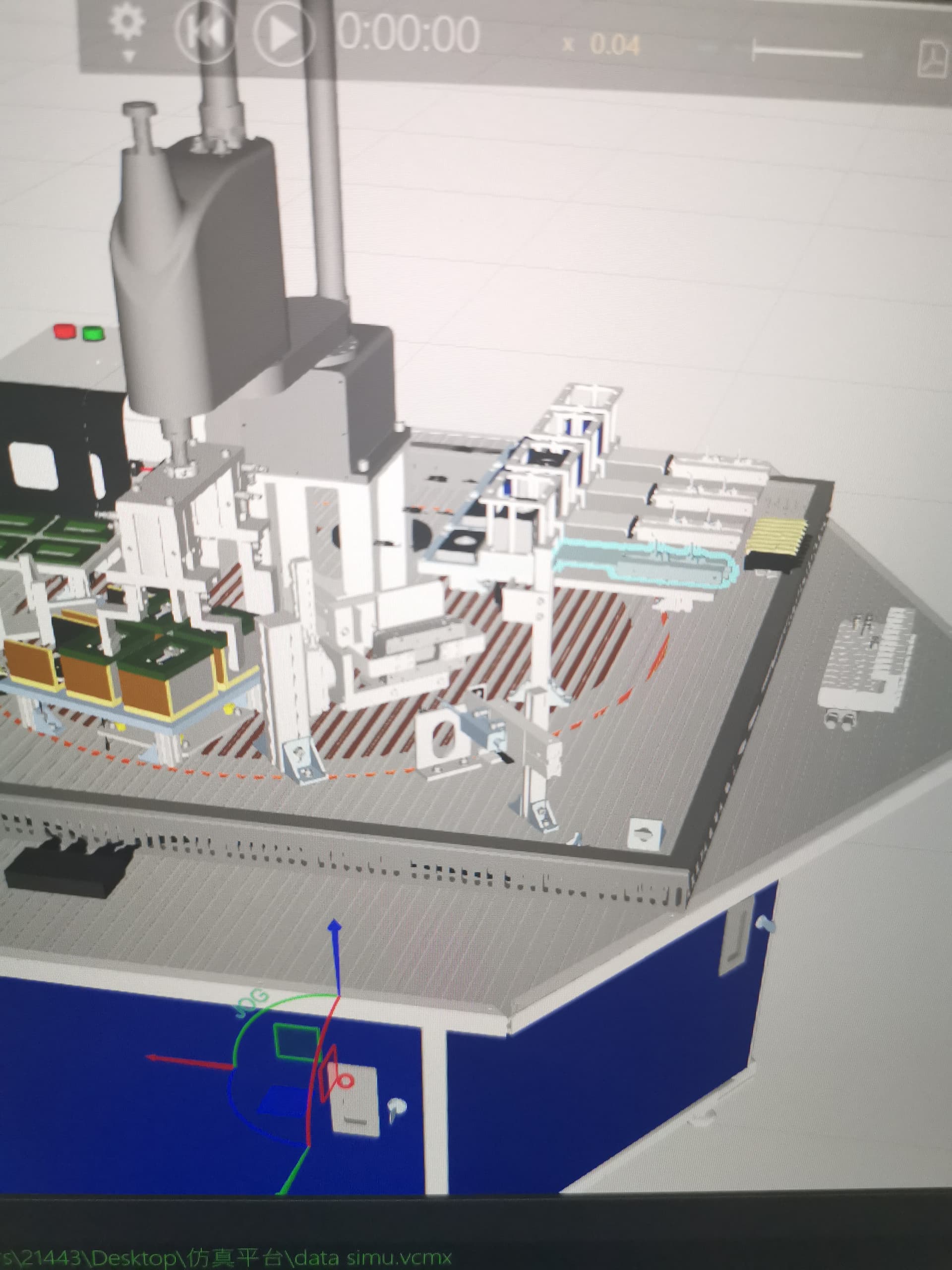

Uploading: data simu.vcmx…
data simu.vcmx (5.5 MB)
Goodday. I have a question. I hope somebody could help me.
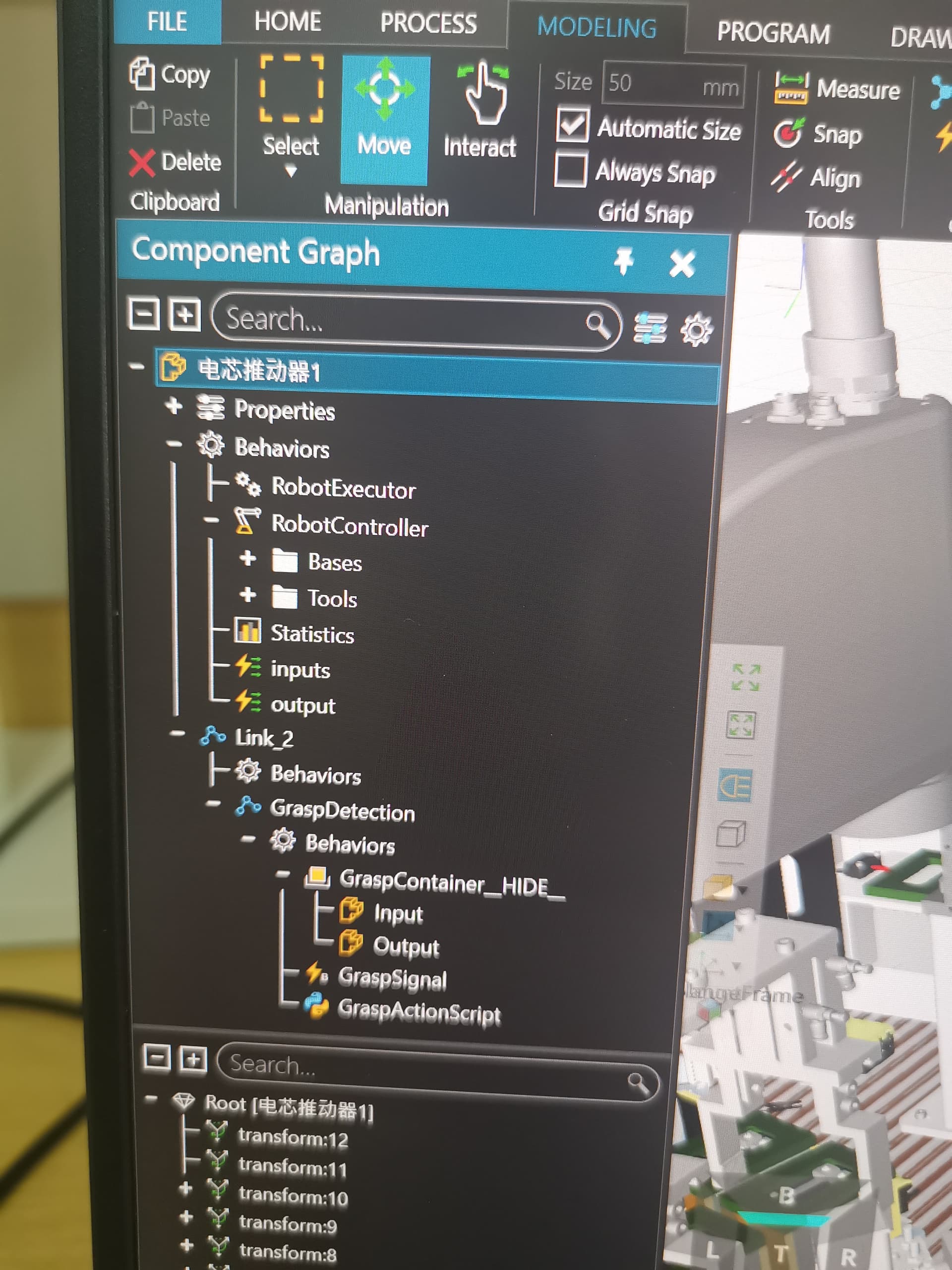
I’m modeling a machine (which I can’t share unfortunately), and I need some help using 2 grasp action wizard’s. I’m using 1 grasp action wizard for rotating a part 180 degrees along the X-axis, so that it will be on top of the other part. The second one I am using for lifting both of the parts. But when I perform that task, it only lifts the 1st part (that has already rotated). I think I’m missing a line in the python code. It must be something with the detection_node line, because when I change the behaviour to Graspdetection 1 and 2, the part change.
I hope to hear from you soon.
Kind regards,
Mark
#New note
I fixed it myself by adding another grasp wizard for the component that wasn’t “grasped”.
Could you please share what you solved?