Hoping someone can help me here:
I am using Grasp Action Wizard to add grasping functionality to IO controlled link. First i struggled with grasping the part, but after making a change to the code as found on the forum, i could grab the part:

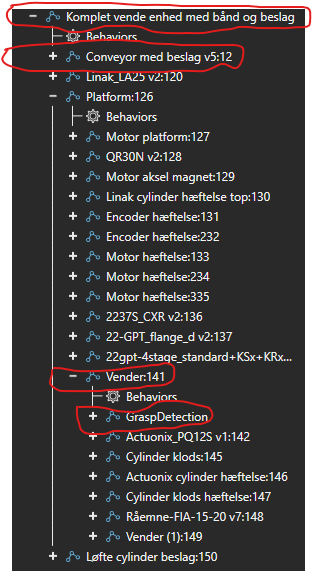
So now the part (the metal plate with holes) is grasped from the conveyor, and follows the link the wizard was performed on, so the plate moves up with the link, rotates with the link and moves down with the link.
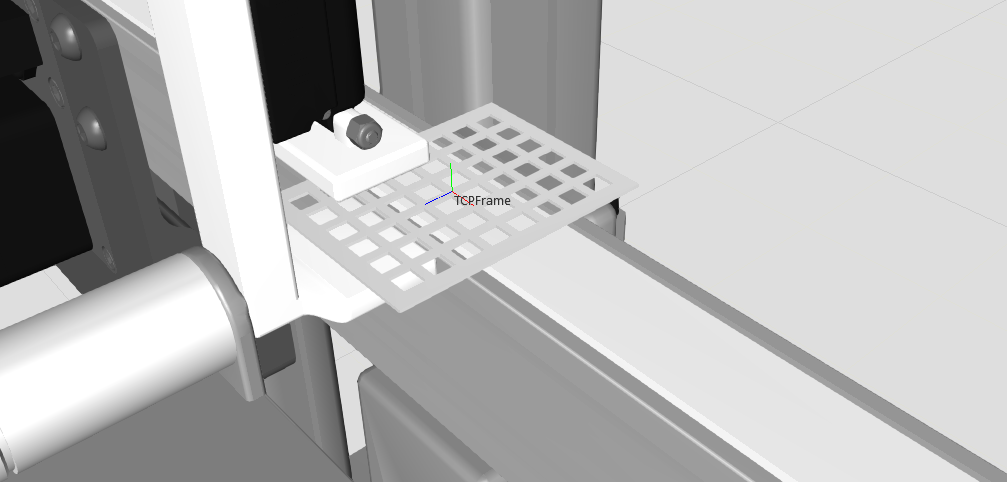
But i can’t release it to the conveyor again. When i release, the plate no longer follows the link, as it should, but it also doesn’t follow the conveyor, it just stays still. I have tried different gravity direction values from 100 down to -25, and i am currently using 0.1 based on experience with using that value setting.
Is it not possible to release to conveyor, or is something extra needed to “attach” it to the path of the conveyor again? And lastly could it have something to do with the hiearchy of my model. One component contains both the conveyor and the link, where the grasp action wizard was performed to?