I’m in the process of learning Visual Components for work and doing detailed engineering design reviews before production.
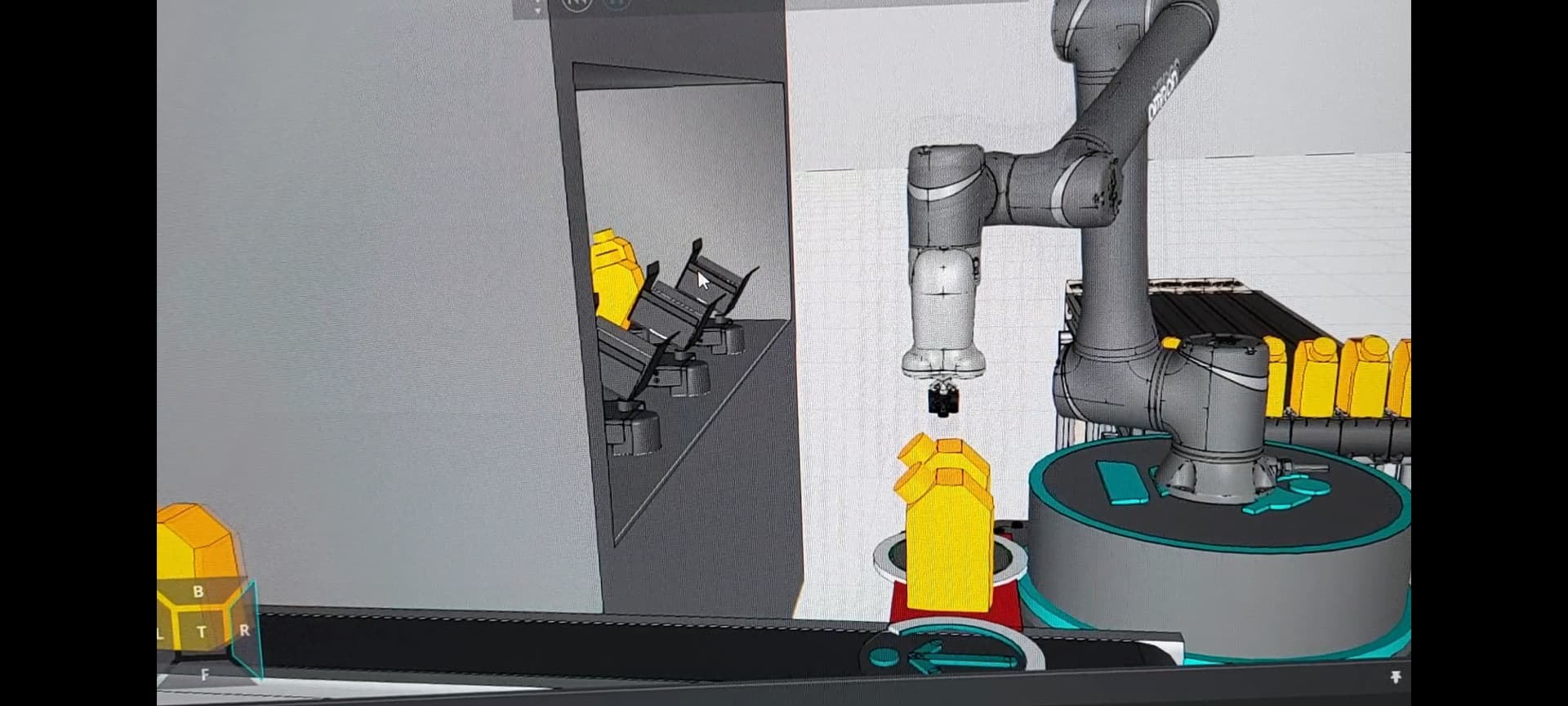
Currently the project I’m working on uses a robot to move bottles between conveyors and a filling machine.
The automated motion commands have the robot picking up the bottle from the top, but for it process we want to pick up the bottle by grabbing the cap.
I have found how you can edit each individual transfer motion and teach the robot the correct pick and place positions.
My issue is that there are almost 50 separate robot transfer links in my project and recording then editing each one will be very time consuming.
Is there a way to set a global option that is related to product and tells it where the pickup location is?
Thanks