Hello.
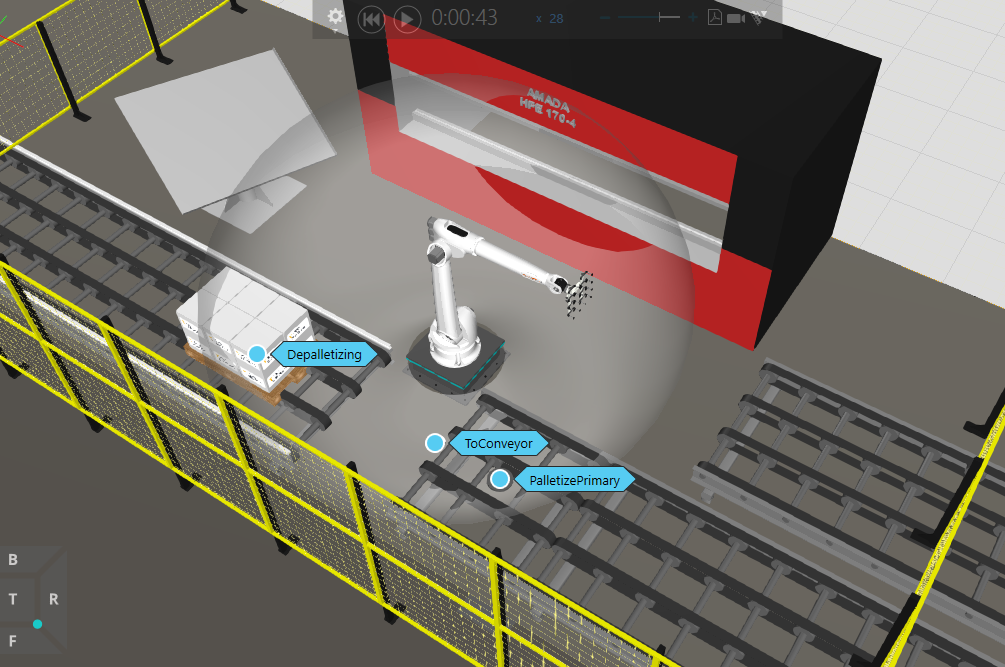
This might be a completely rookie question (as I am a rookie  ) but I am trying to depalletize with process modelling. I looked at the demo layout called PM Assembly Depalletizing, and tried to transfer it to my layout (as illustrated below).
) but I am trying to depalletize with process modelling. I looked at the demo layout called PM Assembly Depalletizing, and tried to transfer it to my layout (as illustrated below).
I’ve done the following:
- Created an assembly called ‘PalletFull’ with multiple layers of products
- Assigned process executors as in the demo layout
- Linked processes in flow and assigned it to the robot.
But what happens is nothing. The robot will not move at all, and once I got it to move but got the error: “The product has been destroyed” (dramatic).
What can I do to get it to work, so it unbox pallets from one pallet to another - one at a time?
ROBOTLAYOUT.vcmx (7.0 MB)