Generic AMR (Multi Layers) is available in 4.9 eCat now
Notice
Multi-layers AMR loads and unloads from the side. Please modify ResourceLocation so that the AMR docks from the side.
Multi-layers AMR can carry multiple products at once. It is recommended to set the PickApproach and PlaceApproach of the TransportLink to 0.0, 0.0, 0.0, 0.0, 0.0, 0.0
Thank you very much for the official team’s update. After using it, I found 6 small bugs. I hope the official team can update them because they have a significant impact on efficiency
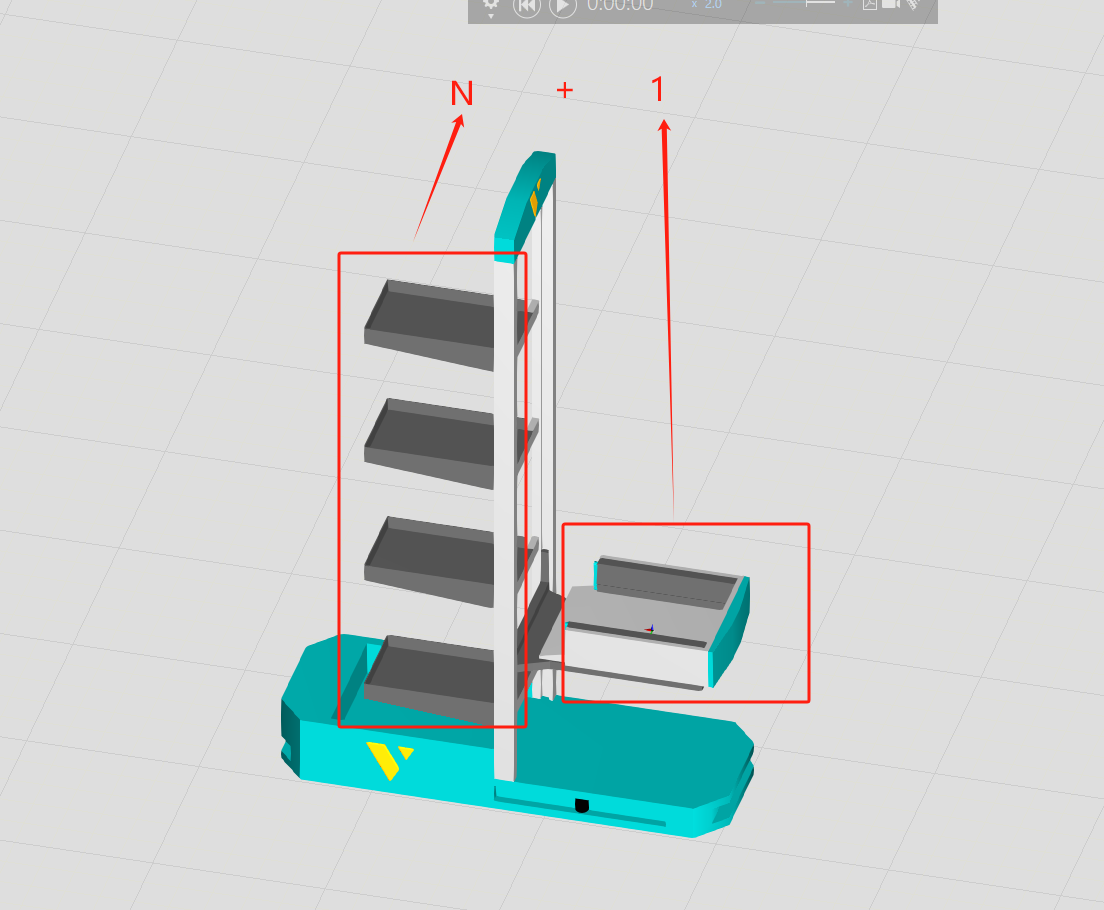
The correct maximum full load for AGV should be: n+1, currently: n.
The AGV can only pick one item from the conveyor line. (It is recommended that the AGV wait in place for 10 seconds or a set time before leaving when there are no TransportOut components on the conveyor line after picking without a full load.)
The minimum and maximum values of the “turn” joint are -90, 90;
There may be inconsistencies between the Object X and Resource Location X of AGV, and the correct situation should be that they must be consistent
During the AGV’s movement, the ‘Lift’ key needs to be lowered to the set value;
Picking and placing on the same ‘Shelf’ should follow the AGV’s current position from near to far, and should not appear backwards during the picking and placing process
This is a general-purpose model, it would be strange if there were differences between the actual load capacity and Levels property, so will maintain the current state. If the manufacturer has such settings, they are free to modify them.
Could you elaborate further?
Will update
The current setting is bidirectional moving, which allows for smoother movement. If you want to have consistent position, you can modify the hidden attribute TravelForwardAxis to +x or -x.
Will update
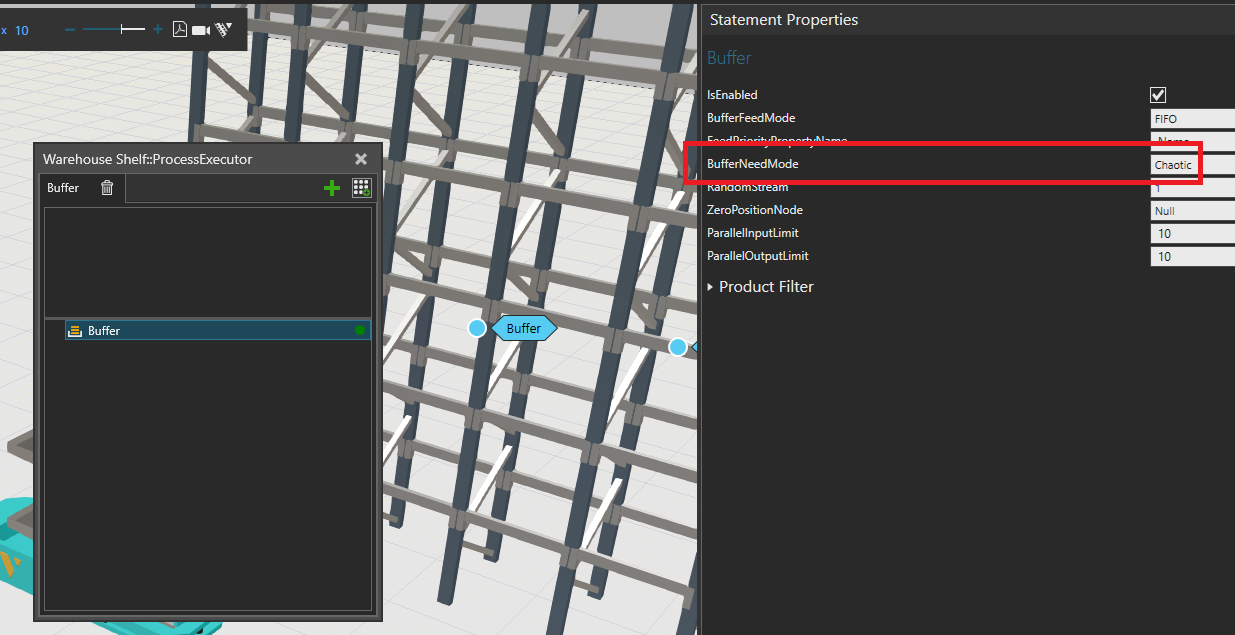
2 things to do
(1) Modify TravelForwardAxis to +x or -x
(2) Change buffer’s BufferNeedMode
1111.vcmx (1.1 MB)
In this demo, the AGV only picks one component from the conveyor line and is not fully loaded, and I also found that the AGV can perform inbound and outbound tasks simultaneously. It is recommended to set it to optional independent inbound and outbound or simultaneous inbound and outbound
It is suggested that the official add this requirement as optional, as device manufacturers usually do not have the capability to develop such a requirement
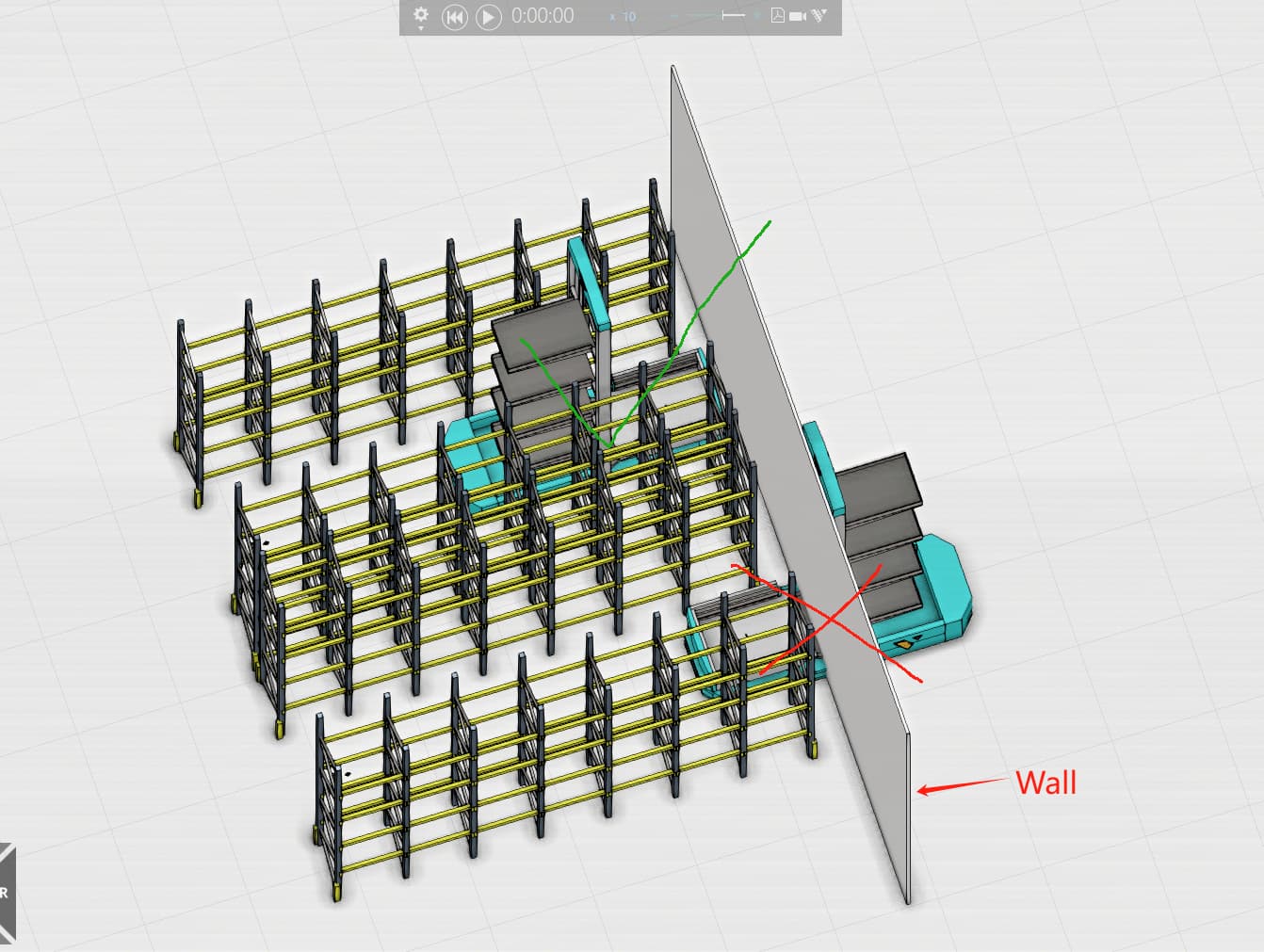
You may have misunderstood this question. If the end of the tunnel is a wall, the normal equipment manufacturer needs to force the AGV to enter the tunnel with+X or - X, but it still has the ability to move in both directions
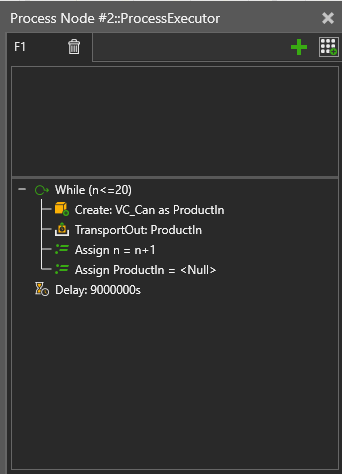
AMR loads only 1 product, because there is only 1 feed and need request, I saw that you’re trying to feed 20 products, you need to Assign ProductIn to Null in the loop.
About extra slot, OK I will add an option for it.
Bi-direction + fixed orientation of pick and place location, the logic is different from current logic, will figure out a way later
For the fourth question, I would describe it more clearly using this scenario:
Due to space limitations, manufacturers usually install shelves near walls or fences in order to obtain larger inventory capacity. If AGVs need to pick and place on these shelves, manufacturers will force AGVs to enter the direction of this aisle to ensure that end components can be picked and placed normally
(Another detail is that the+X of the current AGV model seems to be the - X of most AGV manufacturers’ hardware of this type.)
Because I am involved in the design and implementation of this type of AGV, I have a good understanding of it
I just tried it out and found that the second issue is probably due to my unclear expression, which caused you to misunderstand: regarding the maximum load capacity of “N+1”, I would like to use this picture to rephrase it. “ExtraLevel” should refer to the “TransportNode” that can handle the load
In addition, I also discovered an issue where AGVs are simultaneously carrying out inbound and outbound tasks, which normally greatly affects efficiency. The correct logic should be that inbound and outbound tasks are carried out independently, and only after one task is completed can the next task be carried out. I have uploaded videos and files to demonstrate this issue well。