I’m trying to make a qiuck mockup of a process that only involves a few robots and two feeders. I need the feeders to ‘spawn’ certain goods, that doesn’t travel along a conveyor or equivalent processflow, they are only supposed to be picked up by the robots. The feeders needs to make a creation every 30 second continuous: at the moment it only counts down from when the creation was removed from the feeder, and not from when it was created in the first place.
My issue comes down to this: How to make a feeder make a creation in excatly that spcific time instead of the time from when the last item was removed + the chosen interval.
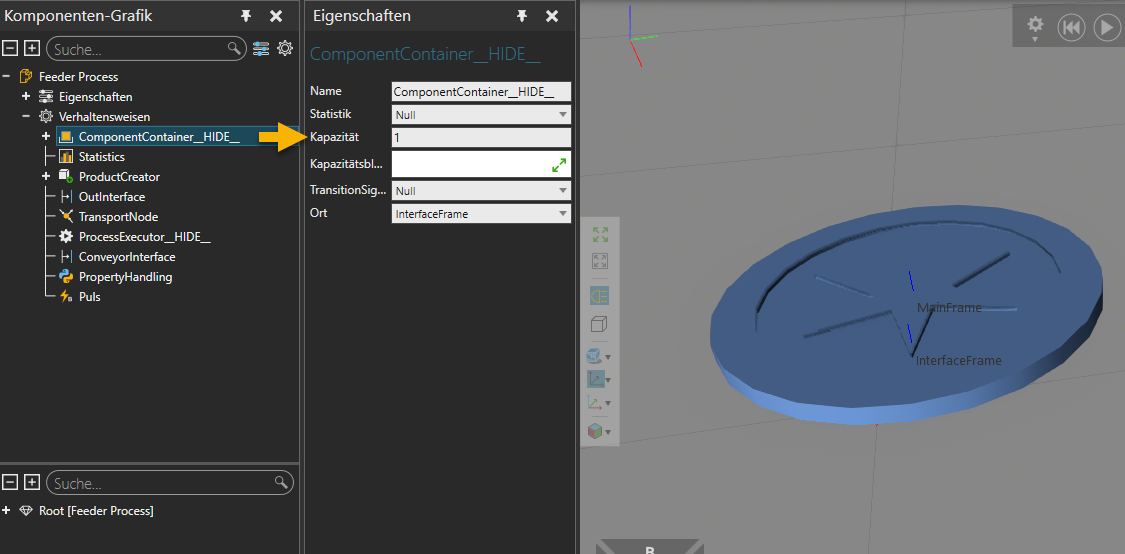
Danke, but it already has a capacity of 999.
One issue I already see is that for convinience sake just threw in a shape feeder, and it does’t seem very agile or flexiable in that regard. I don’t for instance even see any of those menus appear when I try to open the modeling tab.
Maybe a can create a signal into the feeder, for it to tricker the creation?
That sound good but keep in mind that Feeders from the Feeder folder will not create products and are thus not compatible with the process modeling system (process tab). The feeder I used is from the PM flow components folder.
1 Like
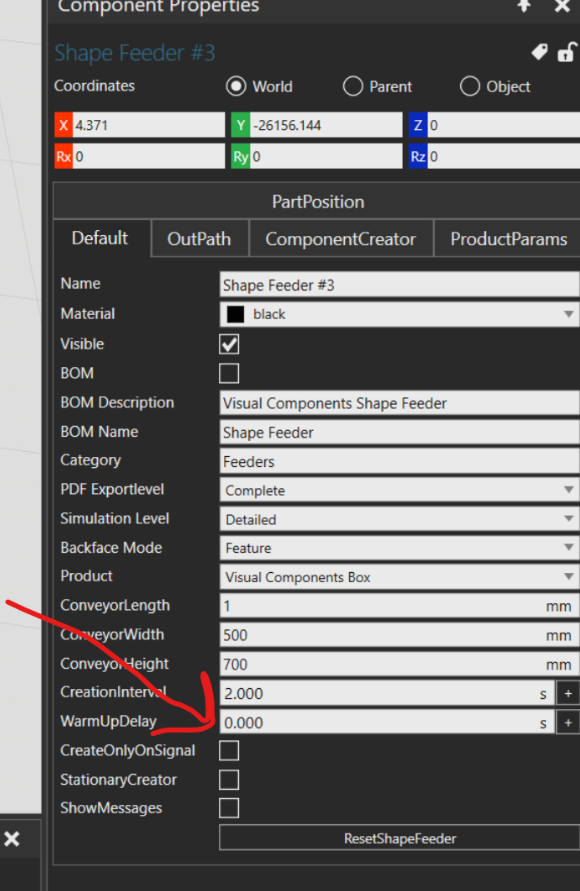
What kind of feeder do you use? Some feeders can use the “CreateOnlyOnSignal”, so you can attach it to another component. In this component, you can add a boolean signal and write a simple Python script that sends a signal every 30 seconds.
1 Like
2023-04-25 10-05-54.mkv (1.2 MB)
@cassian35 I would actually prefer to do it this way, but the output window displays: ‘Process Node::ProcessExecutor__HIDE__::Process #1::Transport Out error: Product’s (box) state within its flow sequence is lost. Process Node::ProcessExecutor__HIDE__::Process #1::Send Signal error: The value expression is empty.’
The simulation I’m currently working on is just a quick mock-up, so if its safe to ignore for now, it might doesn’t matter to much.
For me its just important to be able to produce some component(s) and then be able to grasp those by a robot, to then be able to make quite detalied programming in the program-tab. The movements of the robots are the most important parameter atm. hence they’ll be working in a small space.
@JaccoB thanks! I thought that signal was supposed to come from the ‘signals’-feature in the ‘connect’-menu. I’ll look into implementing a script. I’m still pretty rookie in VC though ![]()
That’s no problem! I made a small guide for you so if you want you can use it.
I’ll use a shape feeder but you can other feeders with the “CreateOnlyOnSignal”.
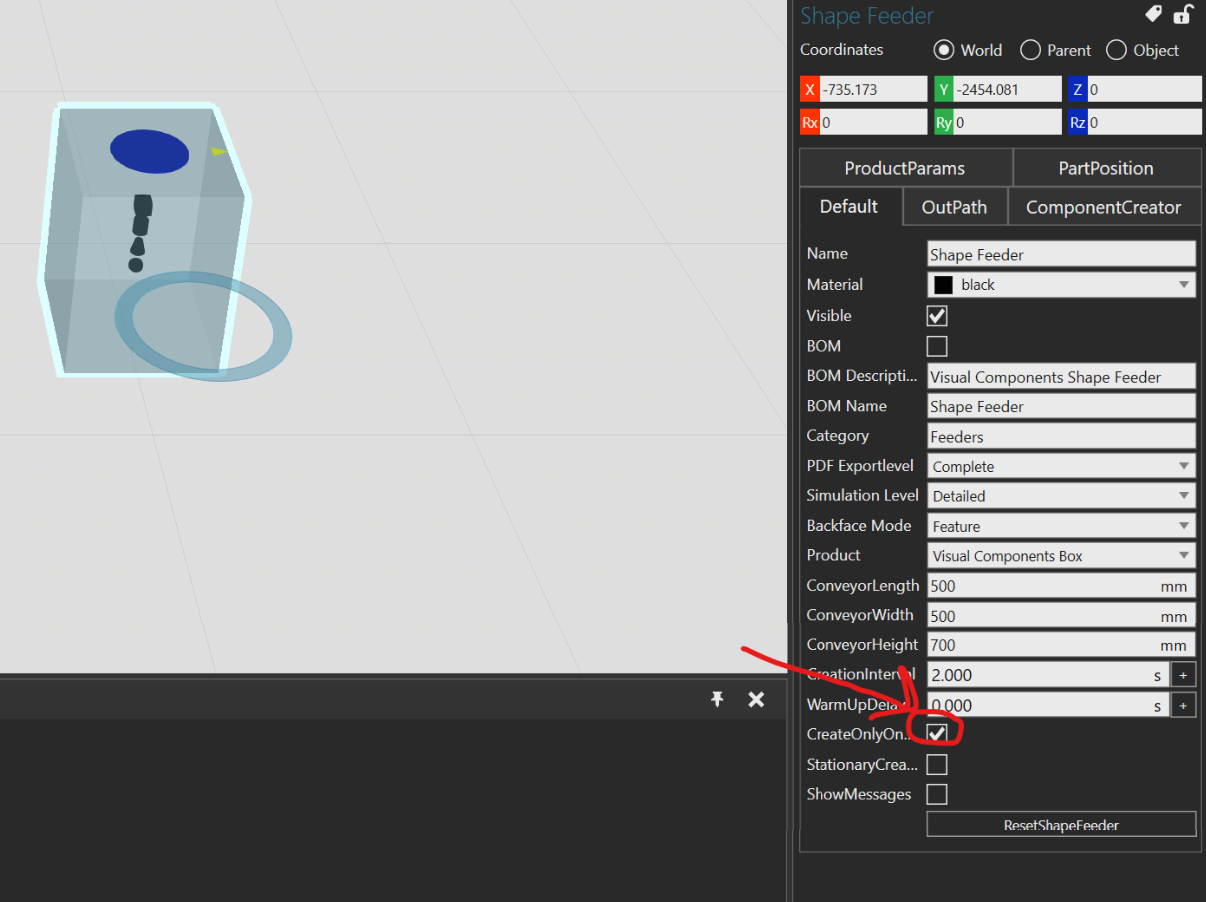
Make sure this property is checked.
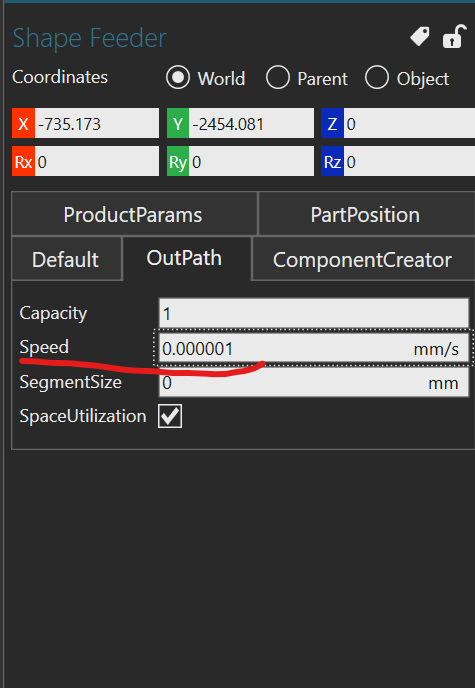
Set the OutPath to nearly zero.
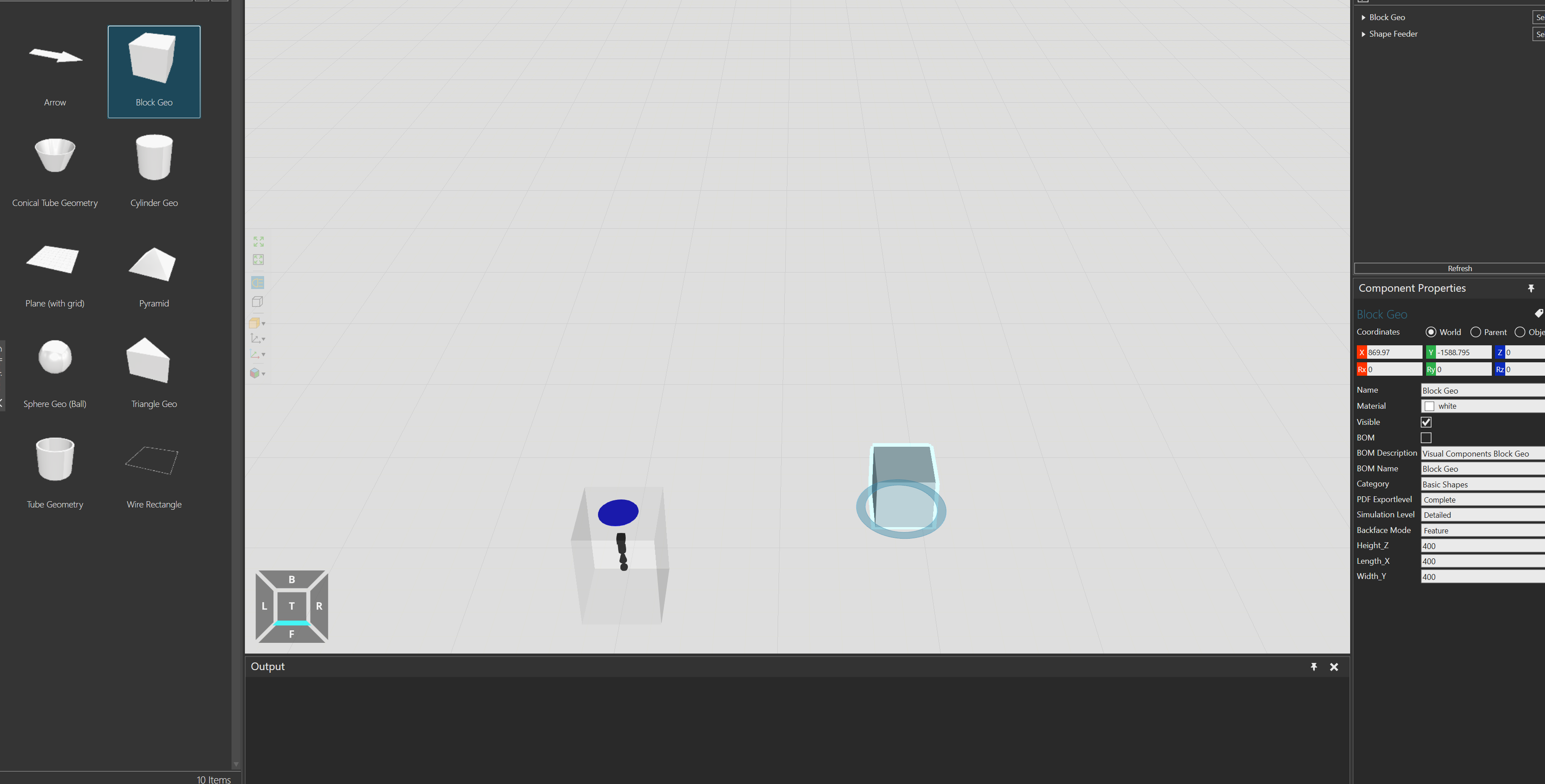
Add a basic shape, like a Block Geo, or something else.
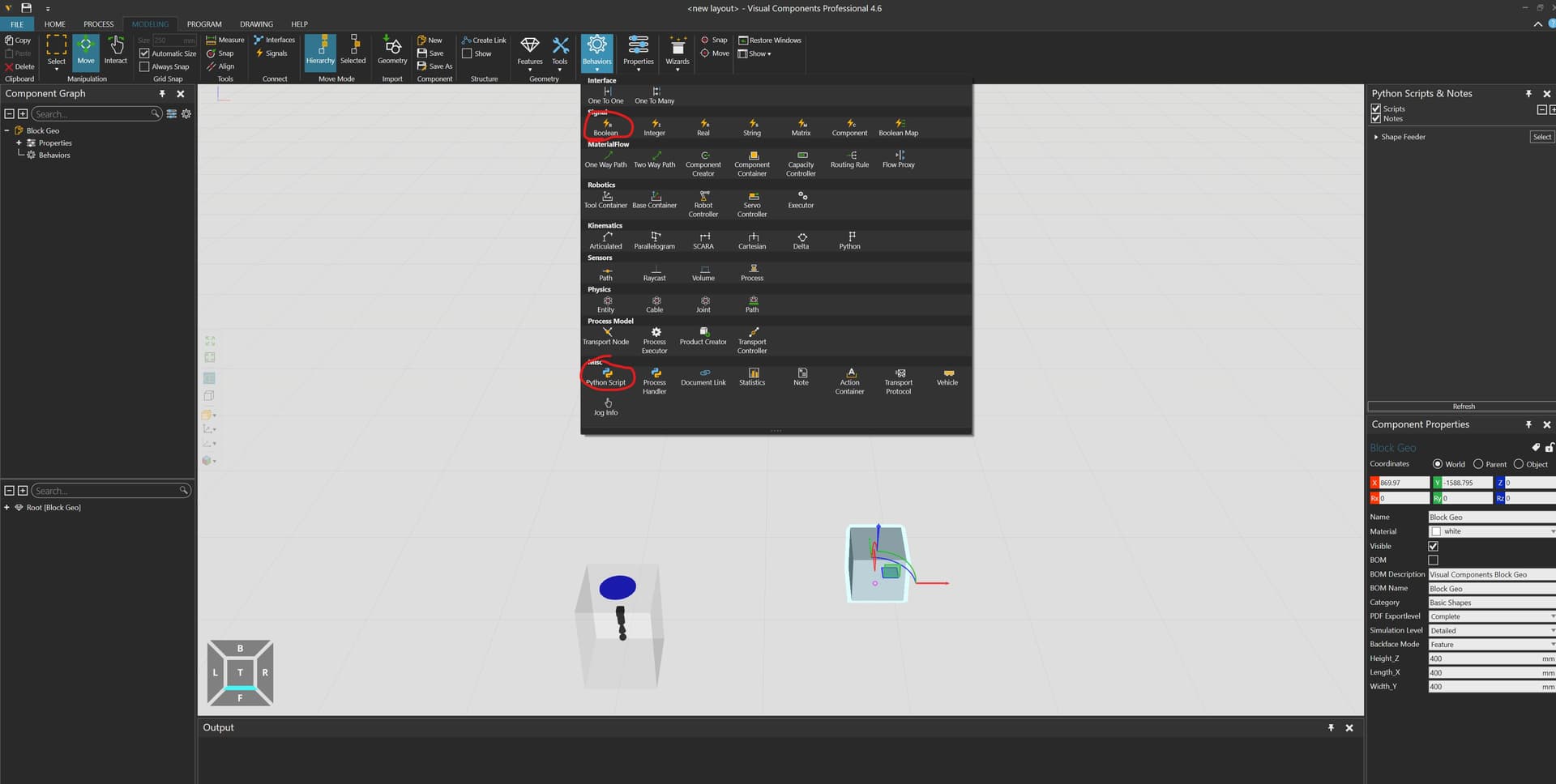
In the modeling tab, add a Boolean signal and a Python Script to the Block Geo.
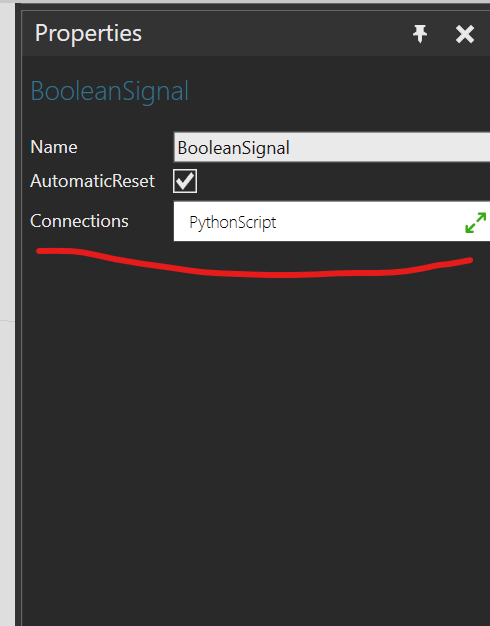
Select the BooleanSignal, then in the properties tab, add PythonScript to the connections.
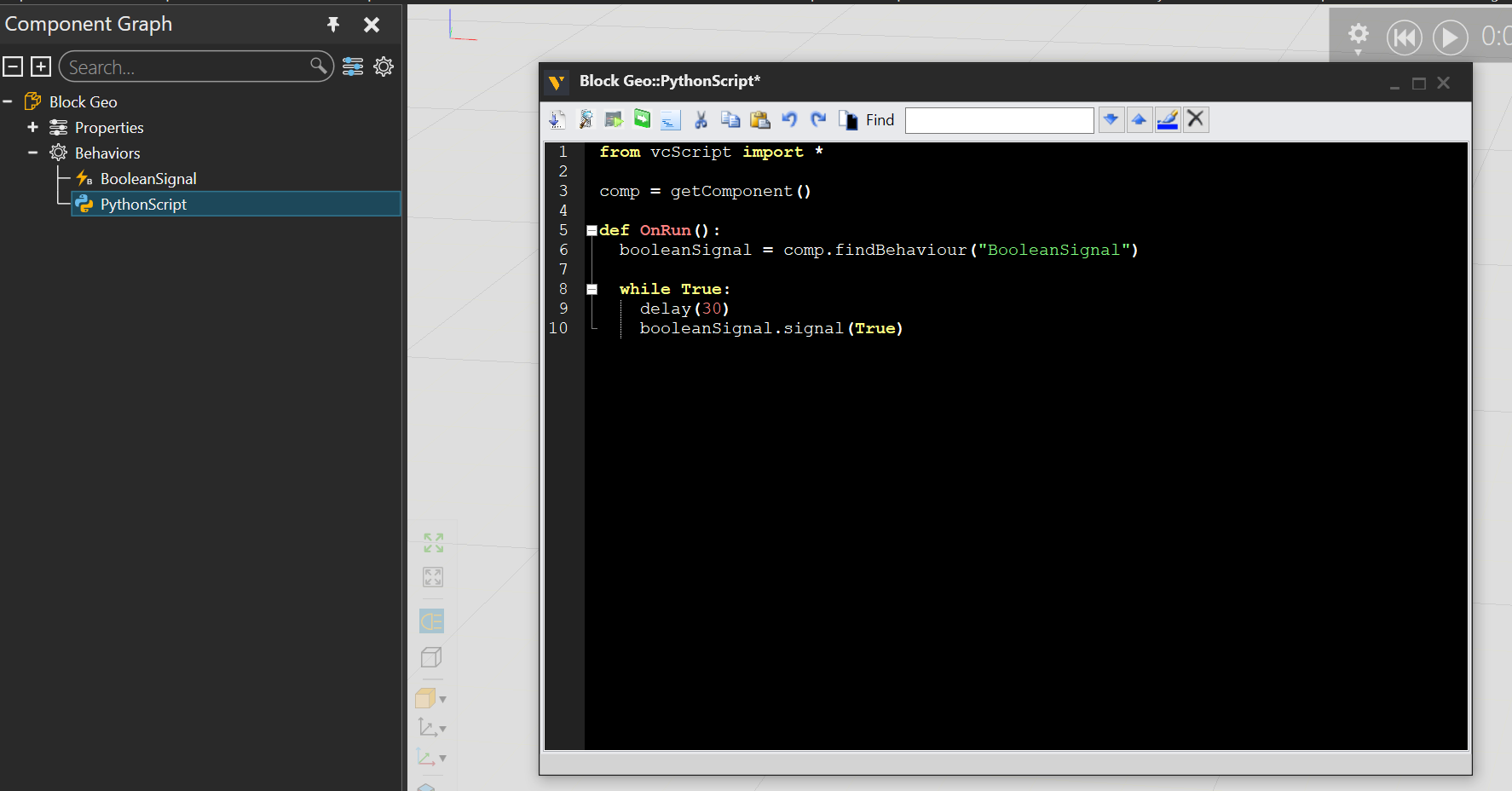
Open the PythonScript and add the following code:
from vcScript import *
comp = getComponent()
def OnRun():
booleanSignal = comp.findBehaviour(“BooleanSignal”)
while True:
delay(30)
booleanSignal.signal(True)
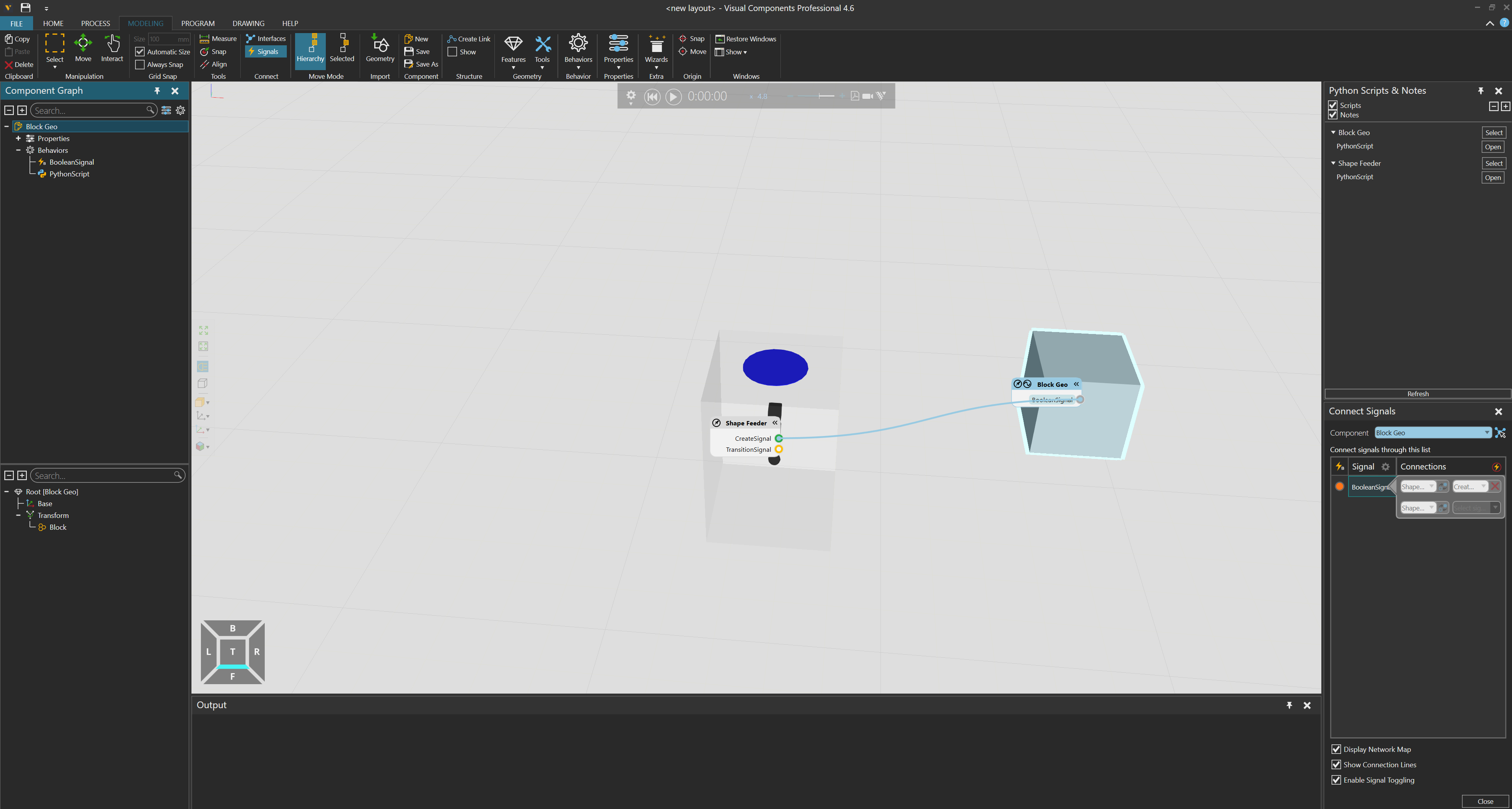
Open the signals map in the Connect tab and connect the BooleanSignal with the CreateSignal of the feeder.
Run your simulation!
Hope this will help you, if you have any questions, please let me know!
Jacco
2 Likes