I am using a Fanuc robot. Can I export the code from Visual Components to make the robot move in the real space according to the path I created?
Hi,
Please check this forum post:
All statements are not supported, if you want absolute accuracy on runtime, I would recommend to check if the connectivity option allows that.
br,
Lefa
Hello, I saw the post, downloaded the zip file, and moved the folder, but the “post process” button doesn’t appear.
Hi,
If you’re using 4.9, make sure that the folder is in My Commands\Python 2 and then reboot the software (or drag and drop the init file on the software 3d world). The post processor should appear in the program tab then.
br,
Lefa
Thanks to your help, I was able to solve the problem.
If you are using 4.9, you can do the processing directly in program-postprocess, without the need for add-on
I am using 4.9 now, but I don’t know how to export the robot program。How to deal with this?
Hi,
- Get the add-on from Robot Program Post Processor (downloader) or use OLP variant
- Put the add-on in the correct folder
- Open up software and generate a program for the robot
- Select the add-on and post process to the directory you want with the language you want.
- If you already have a certain brand (such as Fanuc) selected, it will automatically select the language for you
br,
lefa
1 Like
Hy,
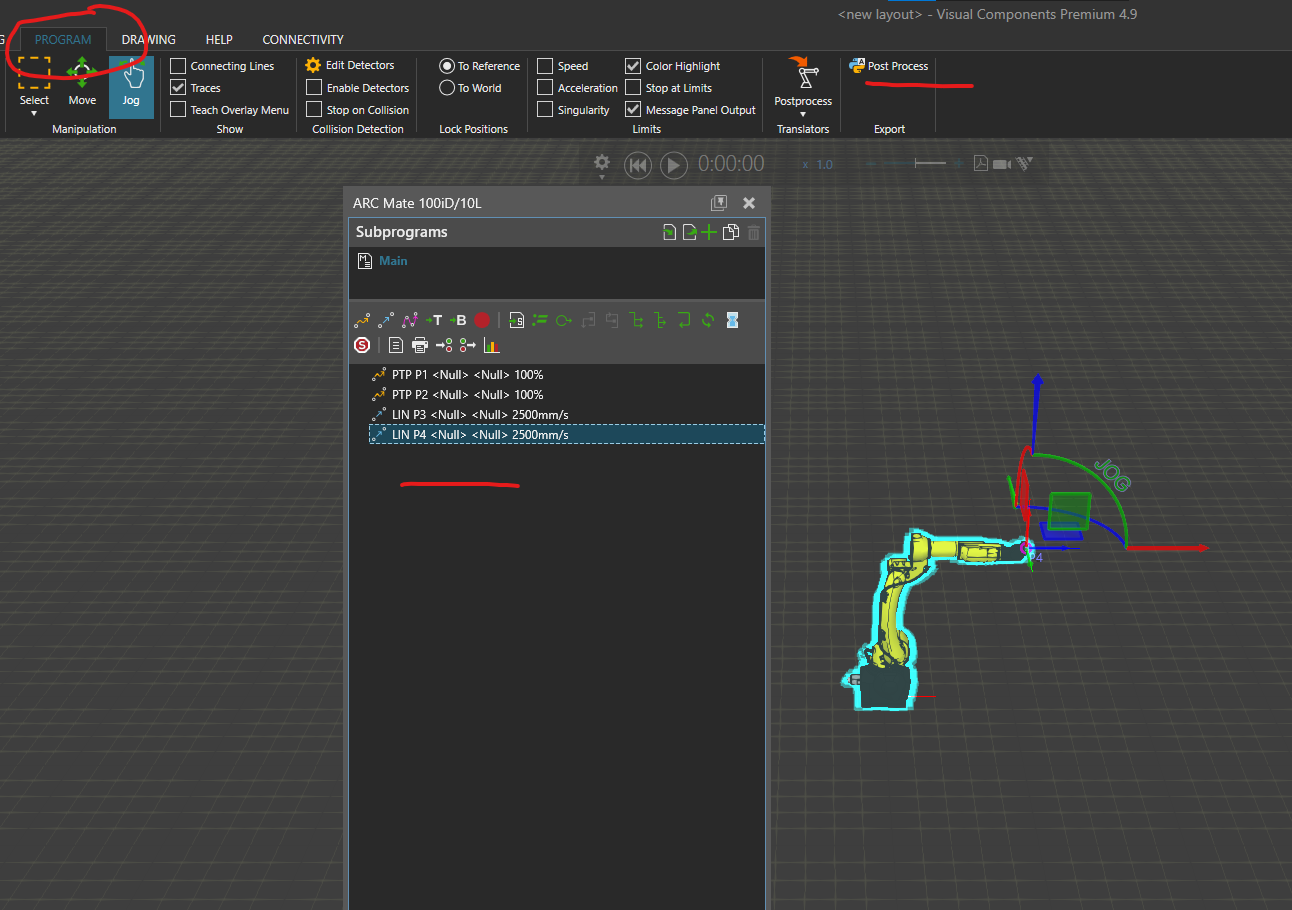
I’ve created a very simple laylout with a very simple robot program.
I’m trying to get our real fanuc to run this simple program but the robot controller unfortunately won’t do this… → Not even the first steps to reach the home position work! ![]()
In simulation everything could be driven without problem.
PostProcessorTest.vcax (592.2 KB)
Here my simple Home PTP-point (If frames are defined or not make no different, before they were):

Do someone see what I done wrong or is the postprocessor a bit silly? ![]()

Thx & Regards
Try using proper base and tool frames instead of NULLs. Post-processor add-on’s readme file has some details like this written for each brand.
-k
Hy @keke,
was the same result with base and tool defined! → I think the Fanuc-PP from Forum is not so good… ![]()
But I also testet the PP included in Premium and with this it works like a charm! ![]()

Thx & Regards
Well I wrote the Fanuc forum PP so that’s on me. Anyway we do have proper translators on OLP products and it’s better to use those if you have access to them.
-k
Hy,
are the PP included in VC-Premium are the same as the VC-OLP ones?
Thx & Regards
Yes Premium has some PPs targeted as tools for robot connectivity plugins. And those PPs are the same as in OLP products. The forum add-on is still there but we don’t develop that actively anymore. If there are some easy obvious bugs we can fix those on the forum add-on but I can’t say what the issue could be on your case.
-k
1 Like
Hi @captain_feature,
Are you able to get the program on to the robot, i.e., do you have an ascii convertor installed on your controller? Or what is the error you are getting exactly that is saying when you try to run it?
You should install the free trial of RoboGuide from Fanuc and import your .ls file in here and check it?
I had program that ran fine in VC, and when I ran it on the robot it was in a singularity for the first position. VC did not show this, but when I checked it in RoboGuide it showed up.
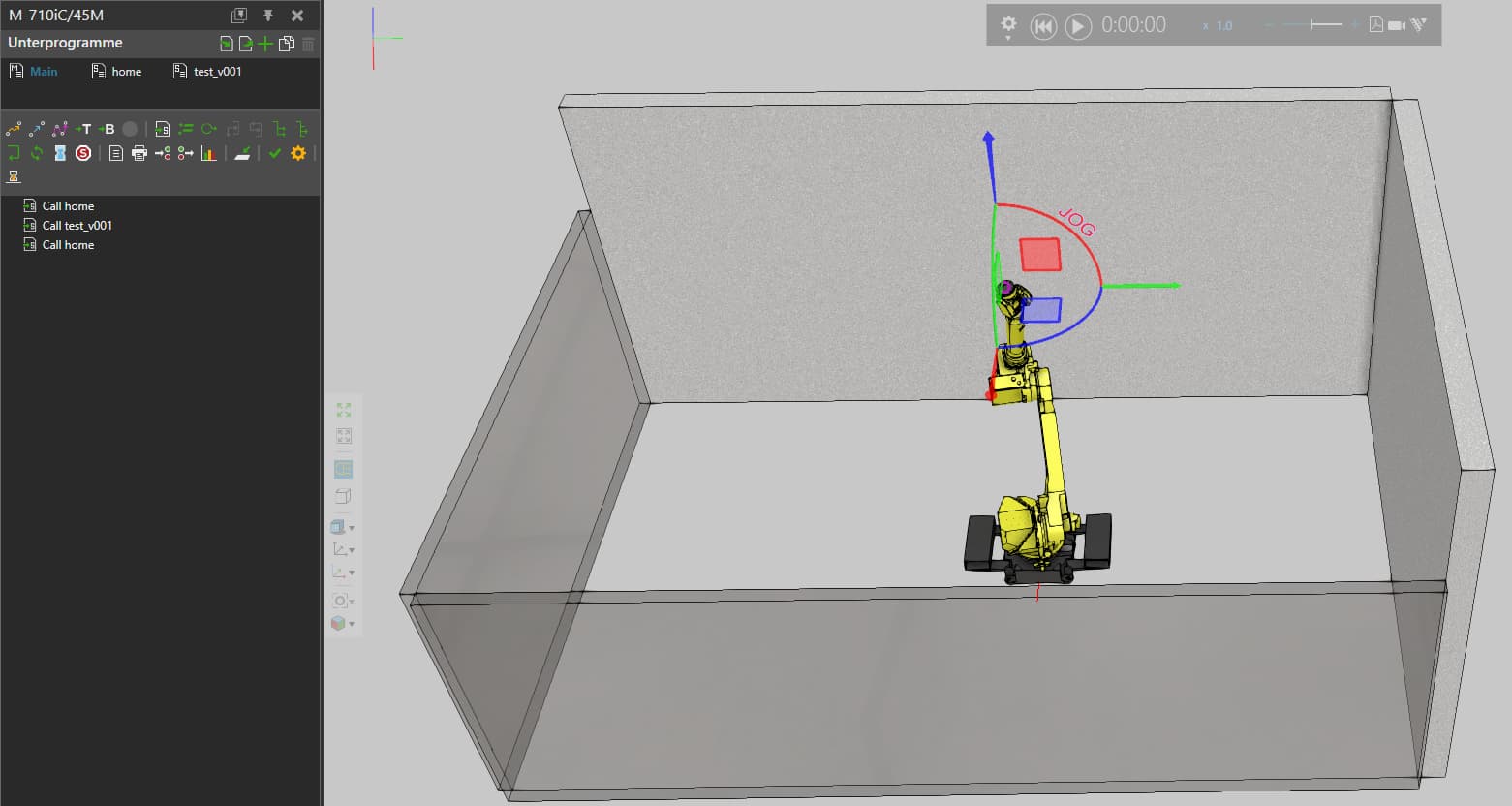
Hy @lauren,
I got such a behavior that a simple point could not be reached from the robot.
But the OLP-Postprocessor seems to be fine! → I take the exported files put in on the robot controll and was able drive all points without problems… ![]()
Regards