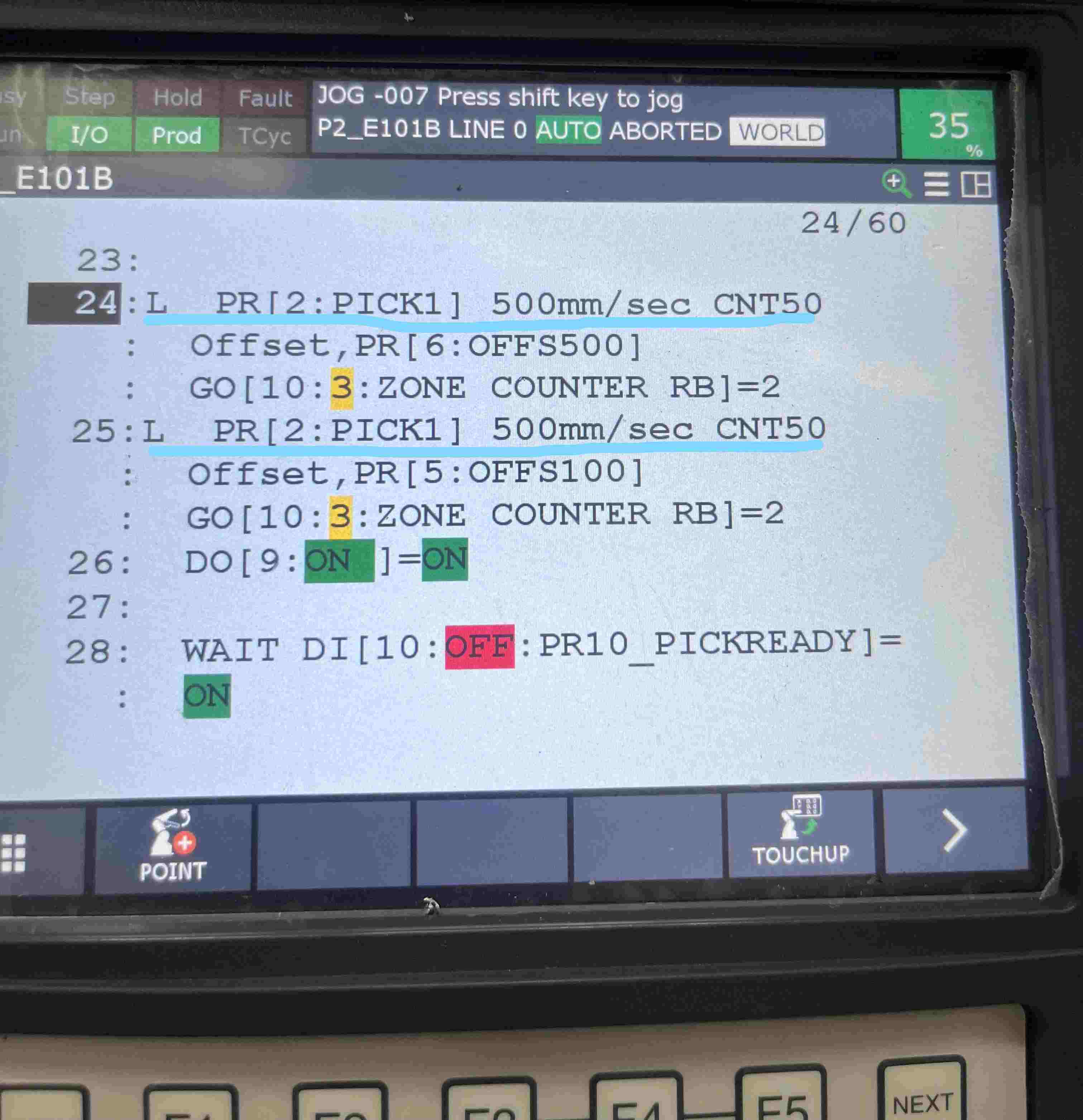
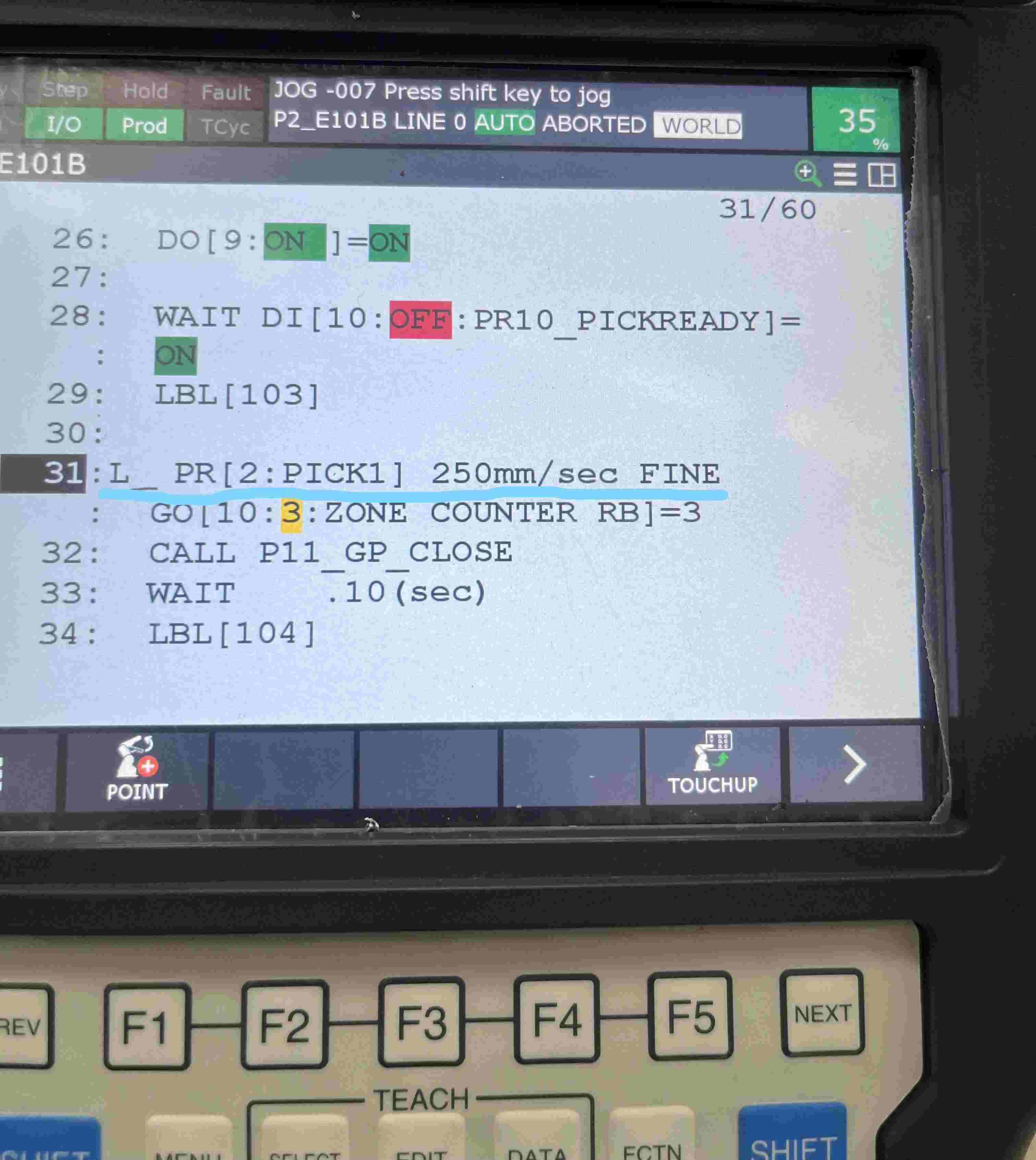
I’m doing Fanuc robot simulation for my company. But when I’m adding the points, It’s giving me acceleration limit error, even though I have changed the acceleration and velocity values, the issue pertains. Kindly help out of this. Thanks in advance.
That is the acceleration for the point itself, and it is also linear statement. This means that the end effector of the robot will move at the set speed but it does not limit the joints.
It would more helpful if you can provide more clarity. So for the simulation to work properly, what is the changes I need to make.
Basically, I need to replicate a physical robotic cell of Fanuc robot in visual components. When I’m doing so, I’m unable to get a cycle time near to the actual one. There is a 30% deviation from actual.
My basic concern is to: How can I make a accurate simulation for a Fanuc robot in visual components, What should be the parameters set for joint and linear points. How can I recreate CNT termination type in visual components.