I am building a machine tending layout (Please check the attached file) i am facing an issue when the robot repeating the same process it shows the following error
“M-900iB/330L ::M-900iB/330L ::Executor: vcHelperJointMove: P1: Position is out of reach of the robot.”
I tried to figure out but not able to do it.
Please help sort this out. Process flow layout parallel.vcmx (6.5 MB)
@Arnaud, as instructed i did it but still the same problem
Can you please open the layout in your software and check if it works or still it shows the same problem
Thank you.
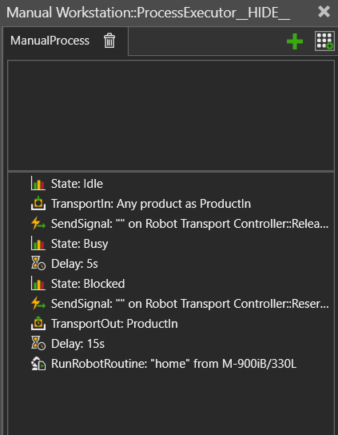
The problem is the robot TC does not get updated with the latest location for the ManualProcess.
It tries to move the part to the old location of the ManualProcess buffer.
One way to work around this is to modify the ManualProcess logic so that it always goes to the home position after emptying. Process flow layout parallel2.vcmx (6.5 MB)