Hi!everybody!
In a previous post, I mentioned that I was researching robot OLP and robot programme post-processors, and recently encountered an issue.
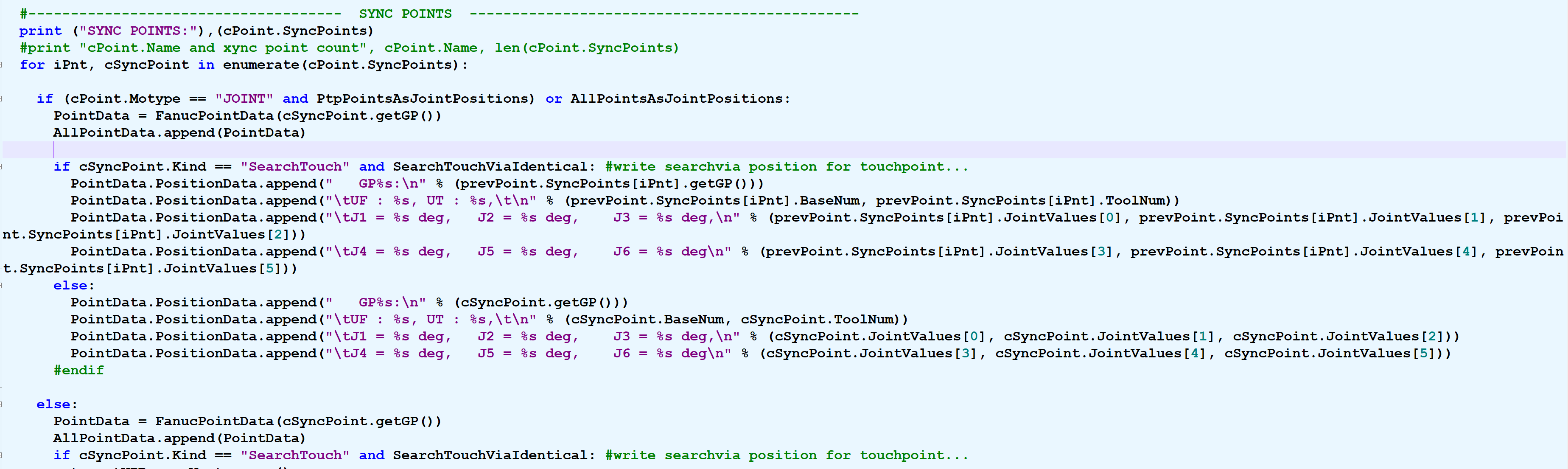
Current post-processors mostly do translations for single-machine programs for robots, but when it comes to dual-machines, it becomes a bit of a handful (at least I haven’t found out how to accomplish it so far).
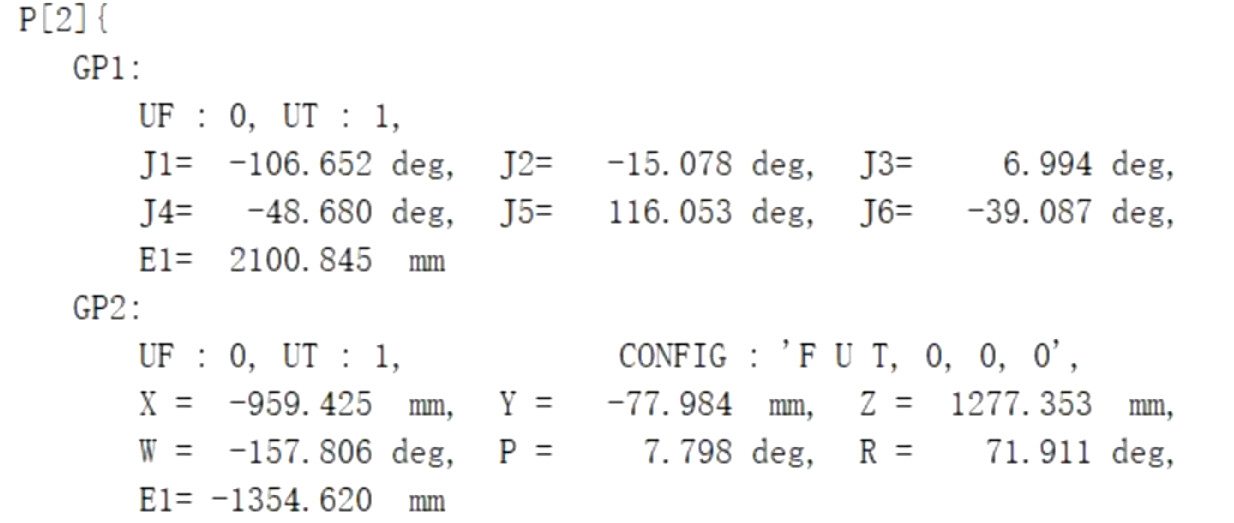
Specifically, what I mean here by dual, is that a robot program has points for two robots, which exists in real robots, as exemplified by a segment of a program for a Fanuc robot:
So, I’m curious if vc currently supports such an export, or am I not aware of this export method?
Any guidance would be greatly appreciated!
Have a wonderful day!