I need to simulation the following system:
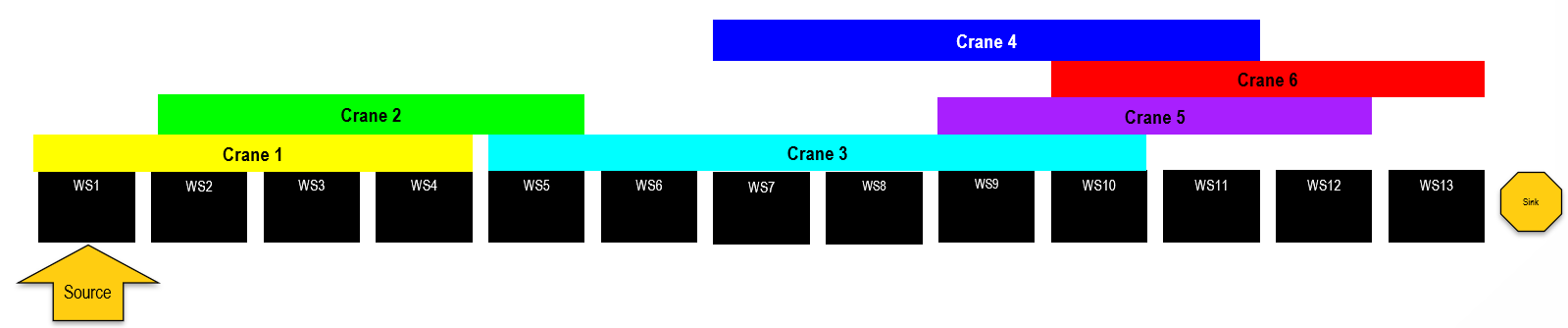
In this function block diagram, the colored bars represent overhead cranes. Length of the bar corresponds to “min” and “max” pickup and drop-off workstations (WS). For example:
Crane 1 can transport a product from WS1 to WS2, WS2 to WS3, and WS3 to WS4.
Crane 2 can transport a product from WS2 to WS3, WS3 to WS4, and WS4 to WS5.
Product can be transported from WS10 to WS11 by crane 4, crane 5, or crane 6.
Etc.
Given that a Dual Rail Transport Controller can only contain 2 cranes (resources), what is the best way to simulate this?
One thought is to fake the cranes with a Human Transport Controller as then the transport link between workstations can access 2+ resources? EX: Transport link between WS 10 and WS11 is “HumanTransportController” with 4 connected resources so any of the available resources can move the product.
However, these same 4 resources cannot be connected to the other transport controllers and links between other workstations. EX: Transport link between WS8 and WS9 is “HumanTransportController2” but this controller cant connect to one of the same four 4 resources in previous example.
I think the simple solution is to update the eCAT Dual Rail Transport Controller to accommodate more than 2 cranes. Is this possible?
Thanks.