hello,
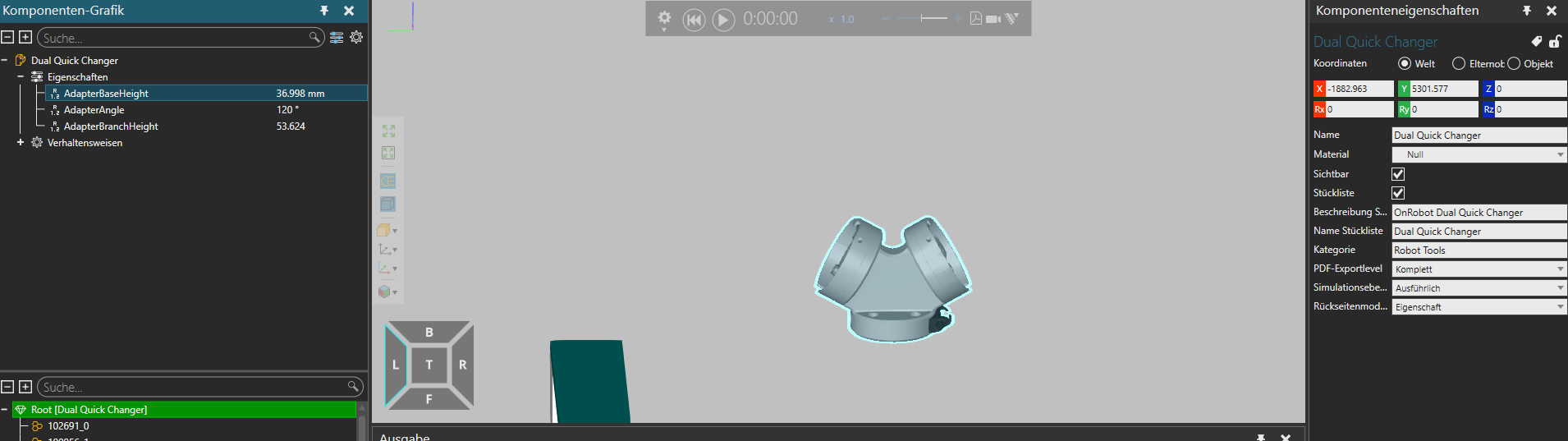
does someone knows what the properties stand for especially AdapterBaseHeight & AdapterBranchHeight. I want to model also an dual gripper but a little bit differently herby i can use the Phytonscript from the Dual quick gripper. But for that i need to know for what this properties express.