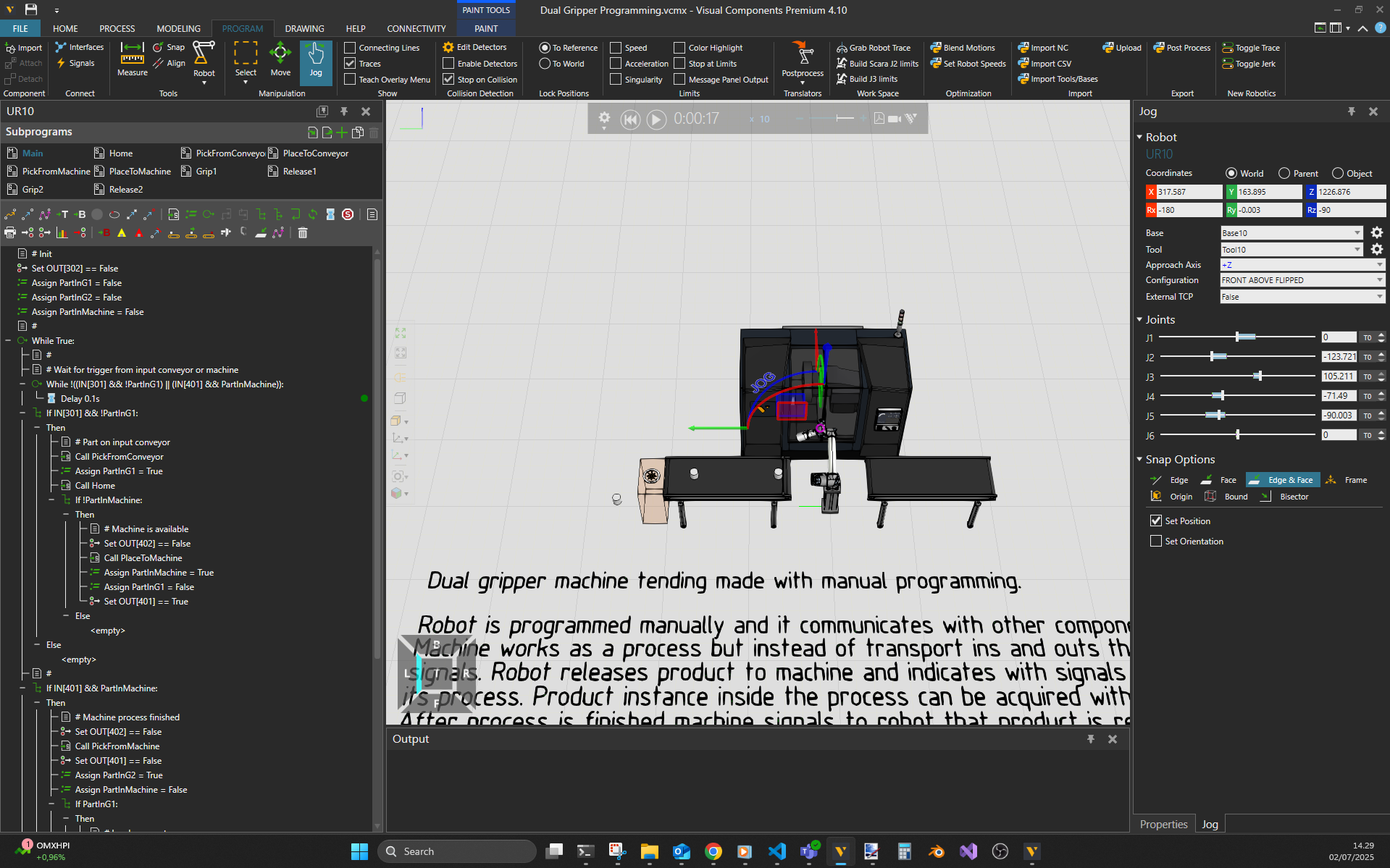
There’s new layout template in 4.10 called “Dual Gripper Programming”. Layout shows how to use manual programming in machine tending with dual grippers. With PM transport controller there’s support for dual gripper but as usual if you want to refine the details in the robot then using manual programming is the way to do it. Example also shows how machine process can be made without using transport ins and outs using boolean signals to communicate with the robot.
-k