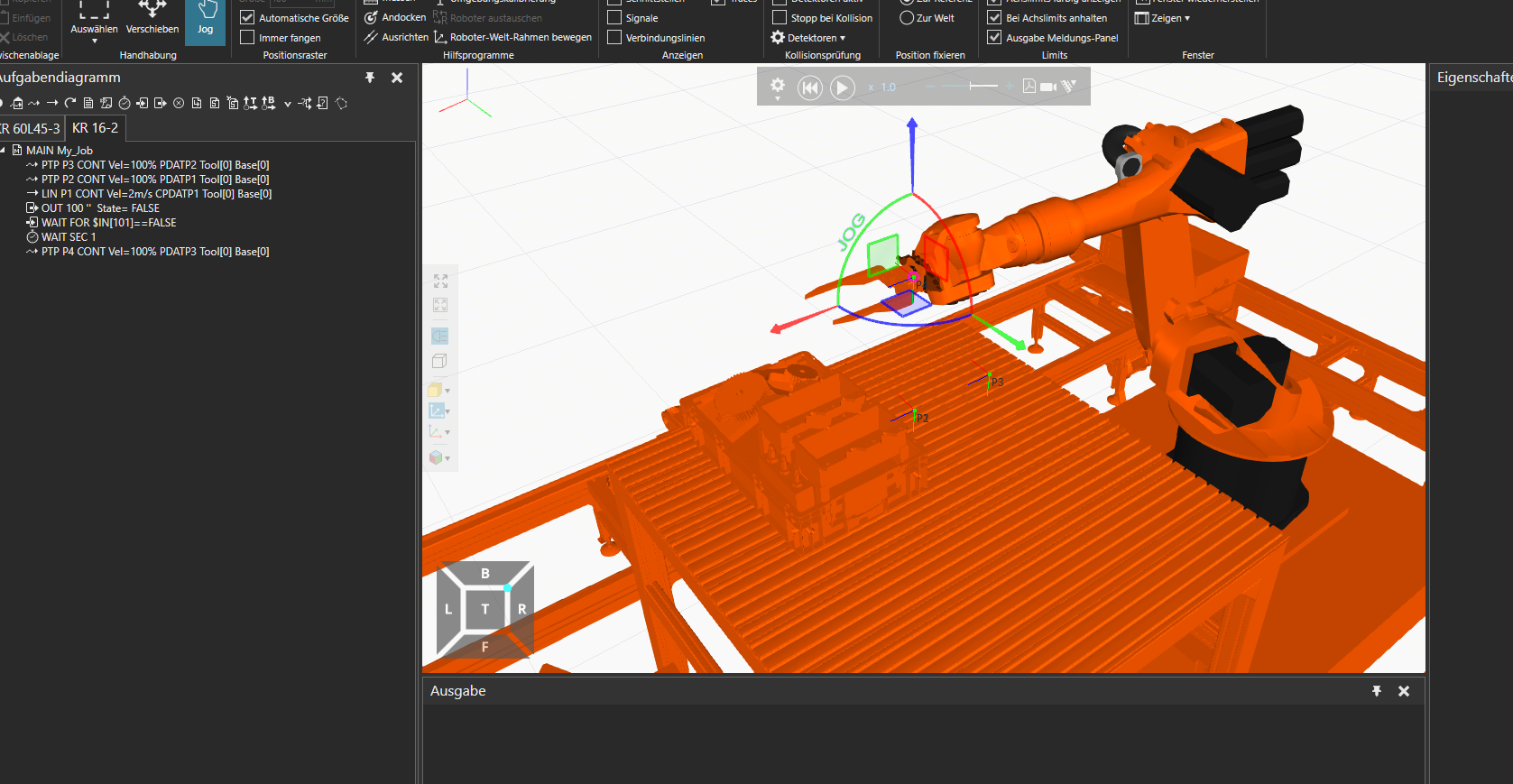
hi guys, i’m currently programming the gripper following the steps of the turorial. The gripper closes but After that it does‘nt pick up/ Lift the component. Maybe some of you know what the Problem is. Trank you very much for your help!
Unbenannt1|690x445 Unbenannt1|690x445
{kind=link}
You have to use an OUT statement to trigger the grasp and/or release of an object. By default, outputs 1-16 in the KUKA robot can be used: True value grasps, and False value releases. When signaling grasp action, a volume is created to detect a component in the 3D world to attach to the robot. The volume is defined using tool frame of robot mapped to the output signal.
If you select the robot as a component, and then go to Component Properties panel, you should see an Actions Configuration section near the bottom of the panel. That is where you can configure the actions using outputs, e.g. modify the dimensions of volume for detecting part.
1 Like
that is true. thankyou!