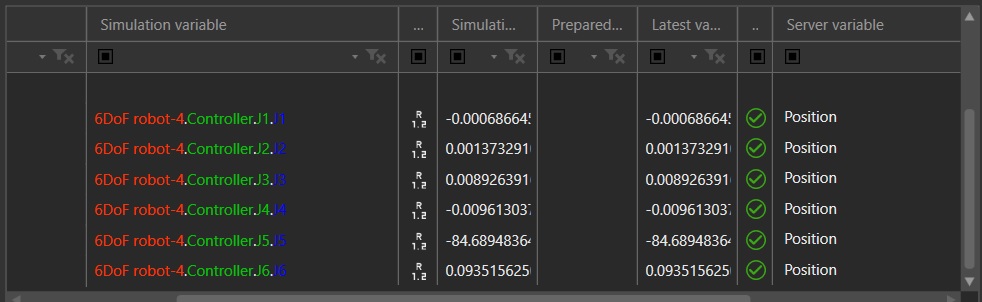
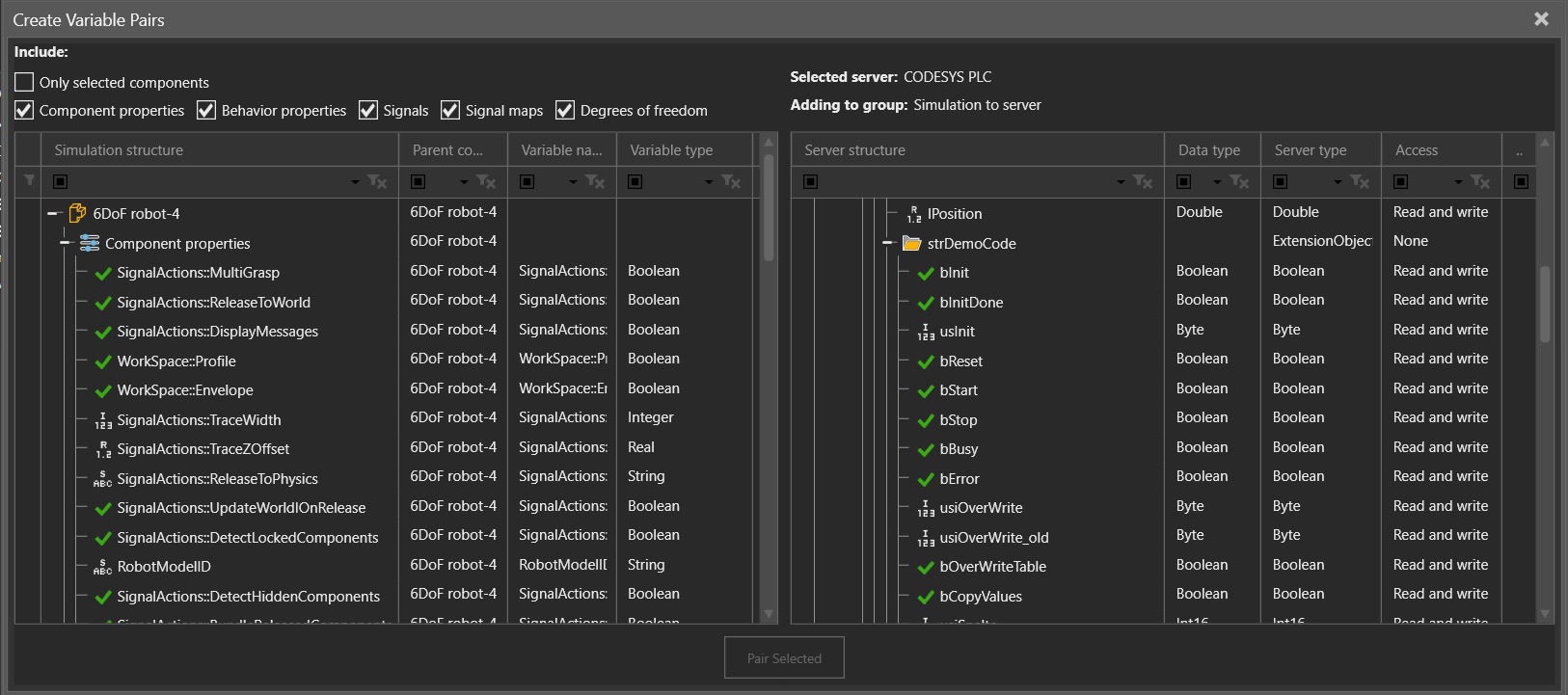
I am trying to create one Digital Twin for one articulated robot with COSEYS through OPC UA. To create that articulated robot model I used Doosan template robot. In connectivity configuration I configured robot DoF joints position in Server to simulation for paired connected variables. But in Simulation to Server I’m not sure about which parameter I should take in concern for paired vairables for my digital twin.? attached images of my conected variabbles