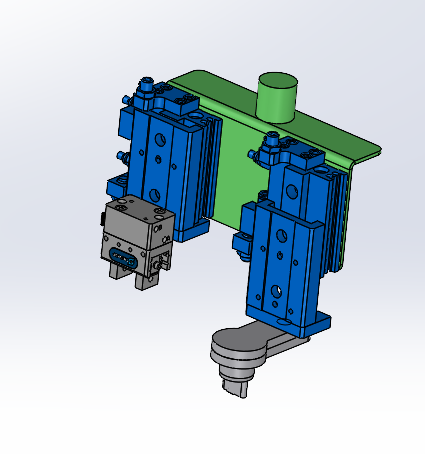
Hi everyone, I am trying to model an EOAT that has a pneumatic gripper on one side and a vacuum gripper on the other. The robot would never actually be using both at the same time, just one or the other dependent on the object it is picking. Has anyone done anything like this before?
Hello Campbs,
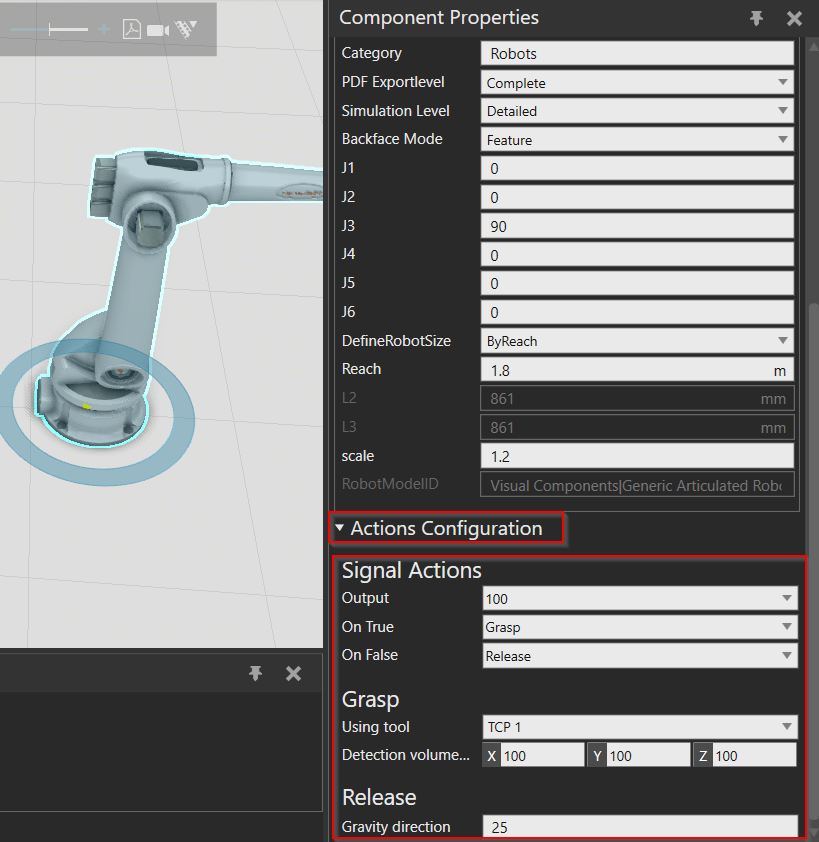
This problem seems to be solved in multiple ways, for example, when using I/O control, connect the Action interface to the tool capture signal (out[1]~out[x]), when the corresponding signal is triggered , the corresponding action will also be triggered, or when using the Pyhton script, it can be written in OnSignal or OnRun, so that the corresponding action will be performed when the corresponding signal is triggered.
In general, a simple way to solve this problem is to connect the action trigger signal and the grab signal so that they act independently instead of simultaneously.
You can follow the model a gripper tutorial for modeling the pneumatic gripper.
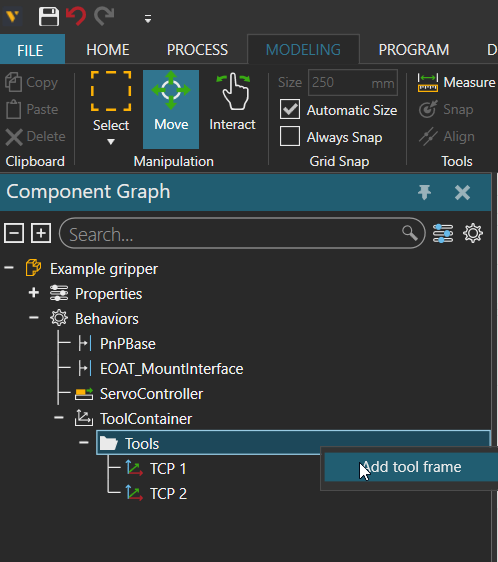
Adding the suction tool is simple, as you can just add a second Tool Center Point to the Gripper by right-clicking on the ToolContainer that is added during the modeling process.