Hy,
does anyone have an idea how to determine the delta from robot-component origin to default oem specific base position for a robot?
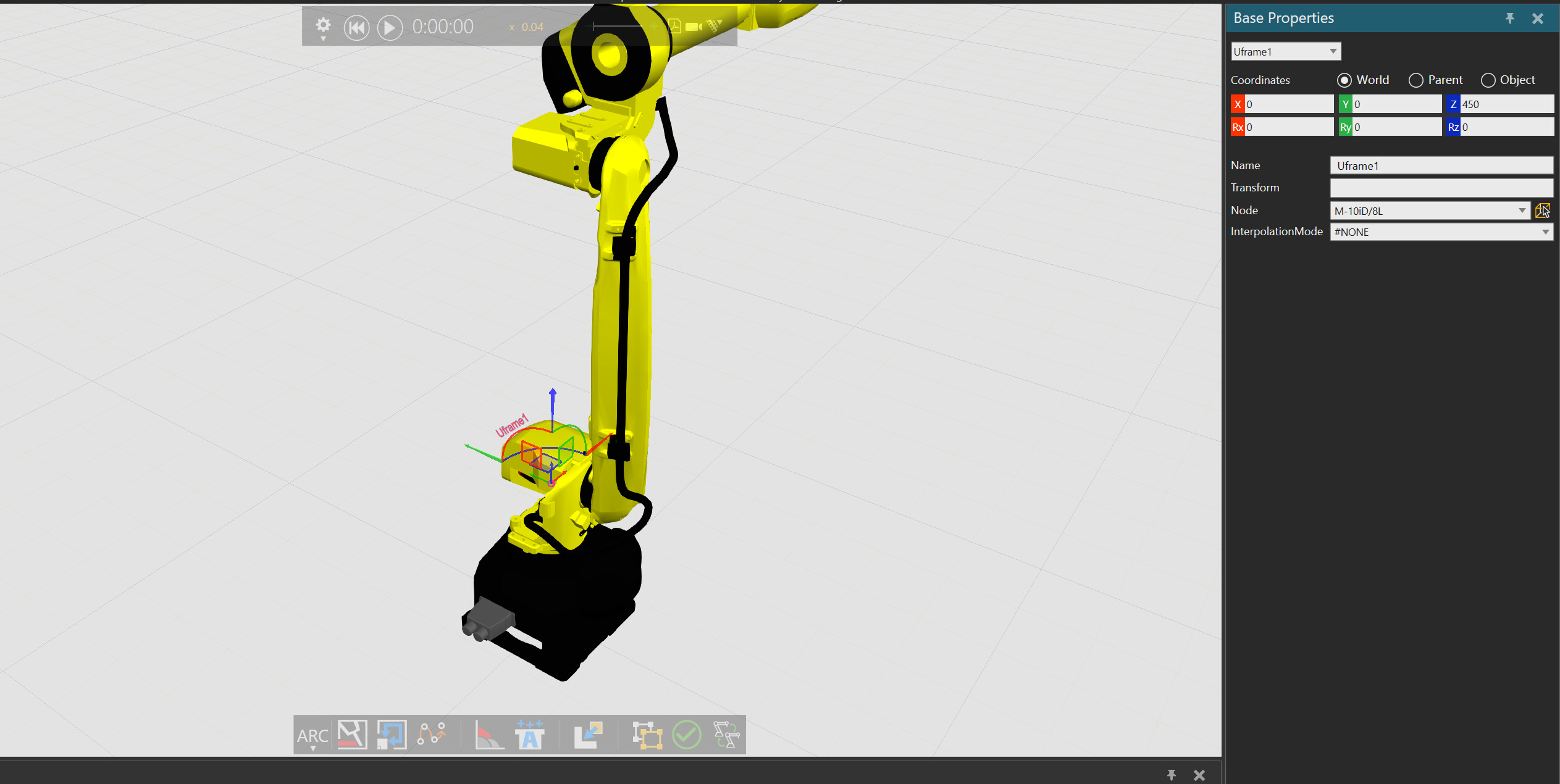
Here an example with Fanuc robot from eCat where the default base pos not equals comp origin:
Thx & Regards
Hy,
does anyone have an idea how to determine the delta from robot-component origin to default oem specific base position for a robot?
Here an example with Fanuc robot from eCat where the default base pos not equals comp origin:
Thx & Regards
Hy @BAD,
jes thats basically whats my target but not by hand as more in code!
And what would be if a user has changed all basis in robot?
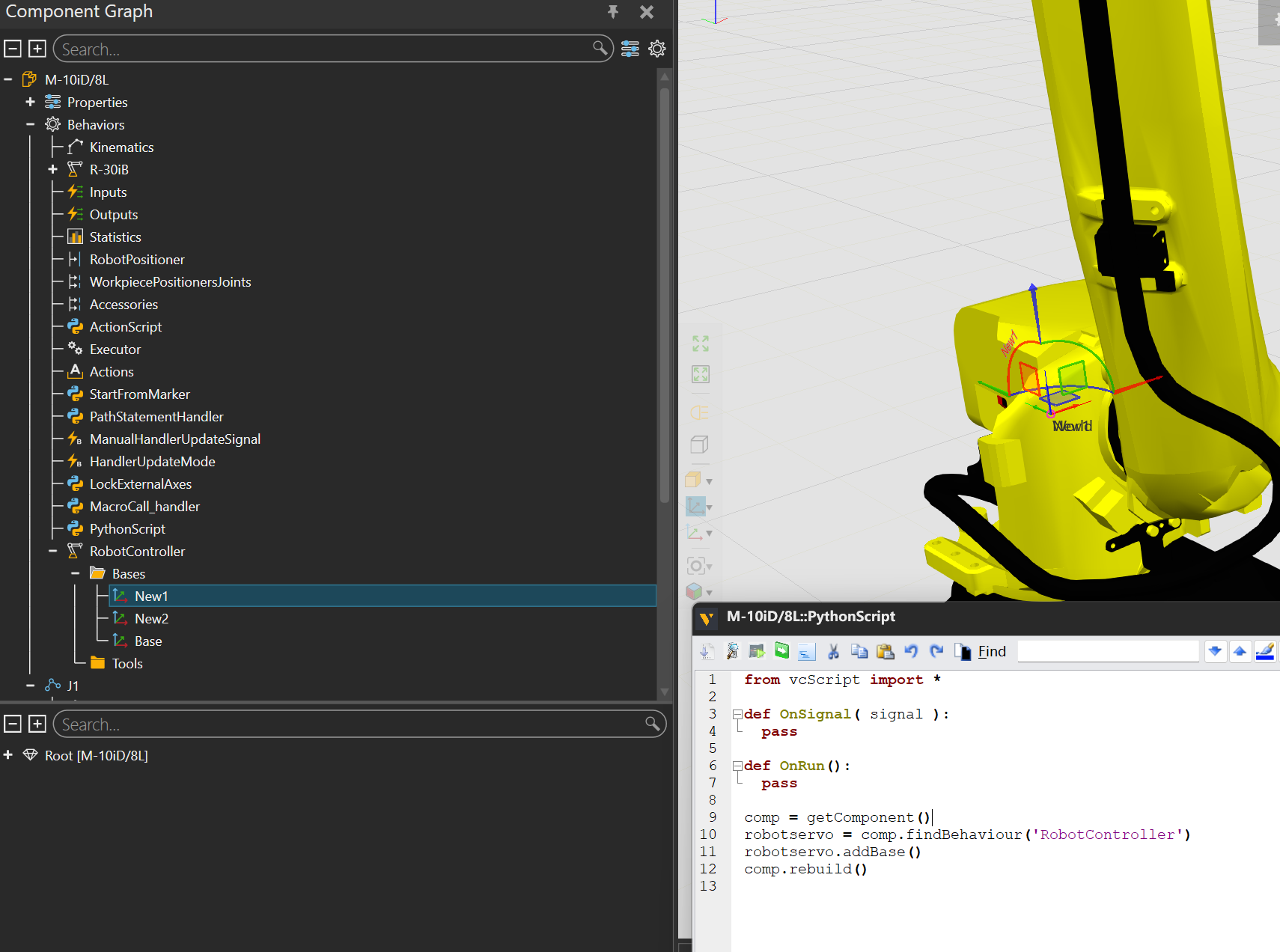
I test to create a base by code and there it unfortunately its not on OEM default position… → When I create a base over UI than its positioned correctly!
Any idea?
Regards
Hmmm, I’m not sure I’m understanding this correctly, but it’s consistent when I generate it using the python api.
Hy @BAD,
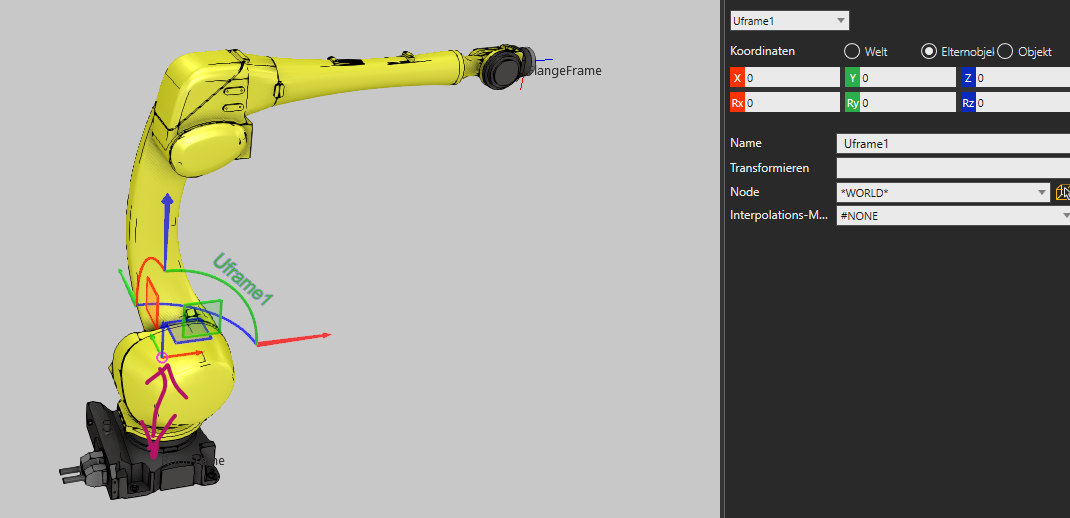
ouh I see that its also consistent with .Net Api (the fresh created fram also appears in oem standard pos but is related to world) and now with a small calculation I get what I want! ![]()
Thx for the discussion which brought me on the right way…
Regards
Glad to hear you found your way!
In fact, I’m thinking that if it does end up being impossible to create a position in the OEM, it’s only right that it can be moved by the values in the robot manual, but of course that would be a bit of a hassle.![]()