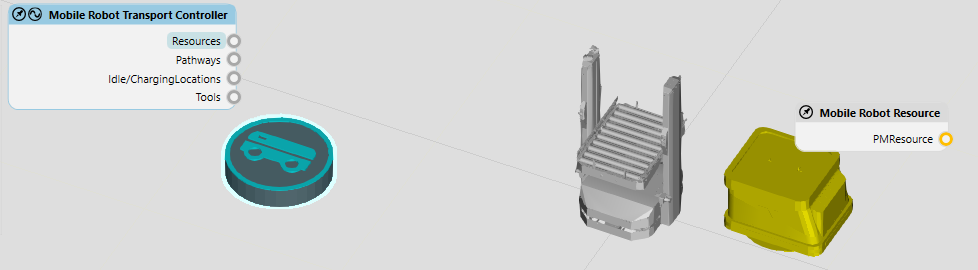
I’m trying to add custom AGV and because I have absolutely no experiences with modeling, I’ve copy pased properties / behaviors and created same links as default mobile robot has. Unfortunately I cannot connect controller to new AGV because its missing interface even though I have created “One to Many” interface.
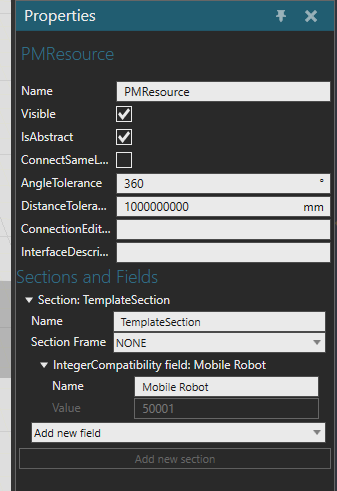
You might be missing some detail in the interface such as the integer compatibility field with value 50001 (see the picture). This field is just used as a filter to distinguish interfaces for different use cases.
Generally I would say that modeling a component with functionality similar to existing component it’s easier to import CAD, copy and paste them to template component from eCat and then saving it as new component (with new VCID). Copy/pasting geometry is often lot less work than recreating all the links, properties and behaviors to blank component.