Hi,
I am trying to add a second PnP interface to my cartesian robot. So that i can attach two seperate end of arm tools / grippers on the same cartesian robot. (up and down motion of the grippers is shared and the left to right motion is seperated)
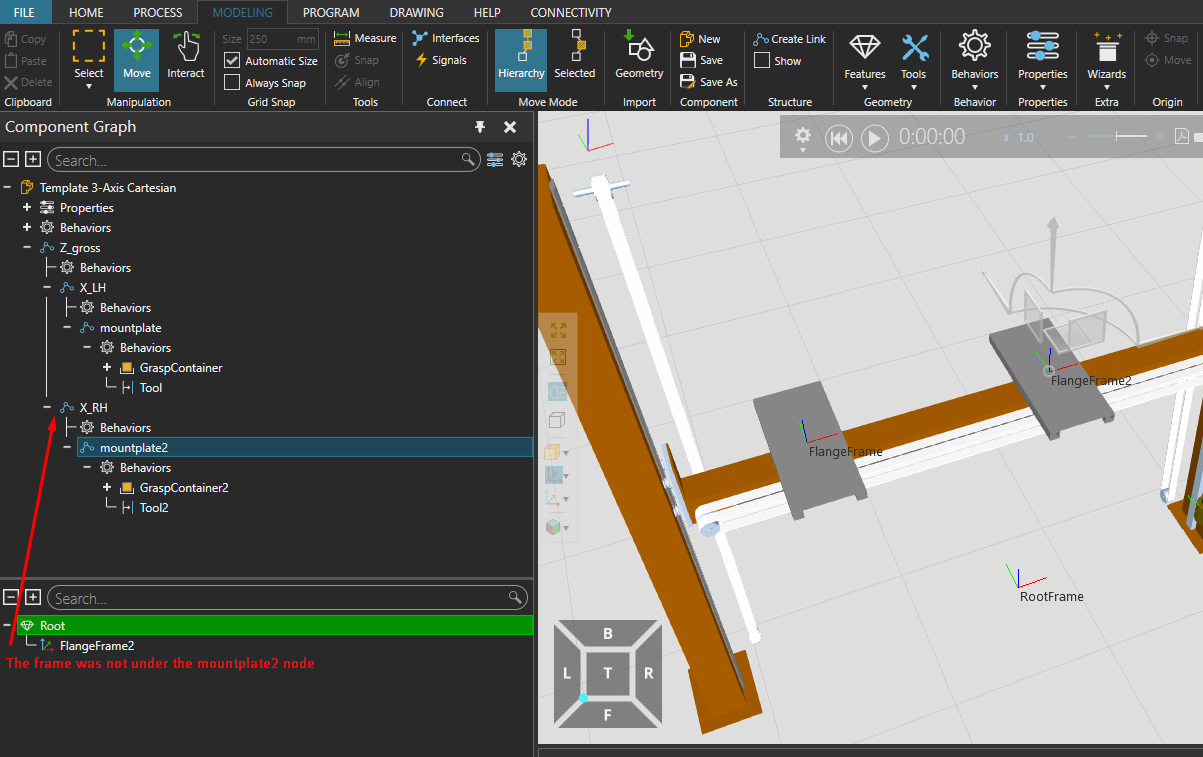
Right now I only have such an interface on the left cart (see picture, yellow triangle). This interface is the default interface for the cartesian robot template

In the modeling tab, I’ve tried to create another tool/PnP interface by duplicating the standard one-to-one interface and changing to the node and frame in the selections and fields tab. However I did not get a second PnP interface to connect something to.
LCES2.0.vcmx (143.1 KB)
I have added my .vcmx file, so that you can have a look whats going wrong. Thanks in advance!
Thom