Good morning,
I have another question for you, maybe someone has a solution.
I have a transfer table, which I have attached to a crane to move it.
Everything works with the moving tool.
When the crane transports a product, everything works fine.
I would now like to try to move the transfer table in the simulation without the crane having to lift/pick up anything.
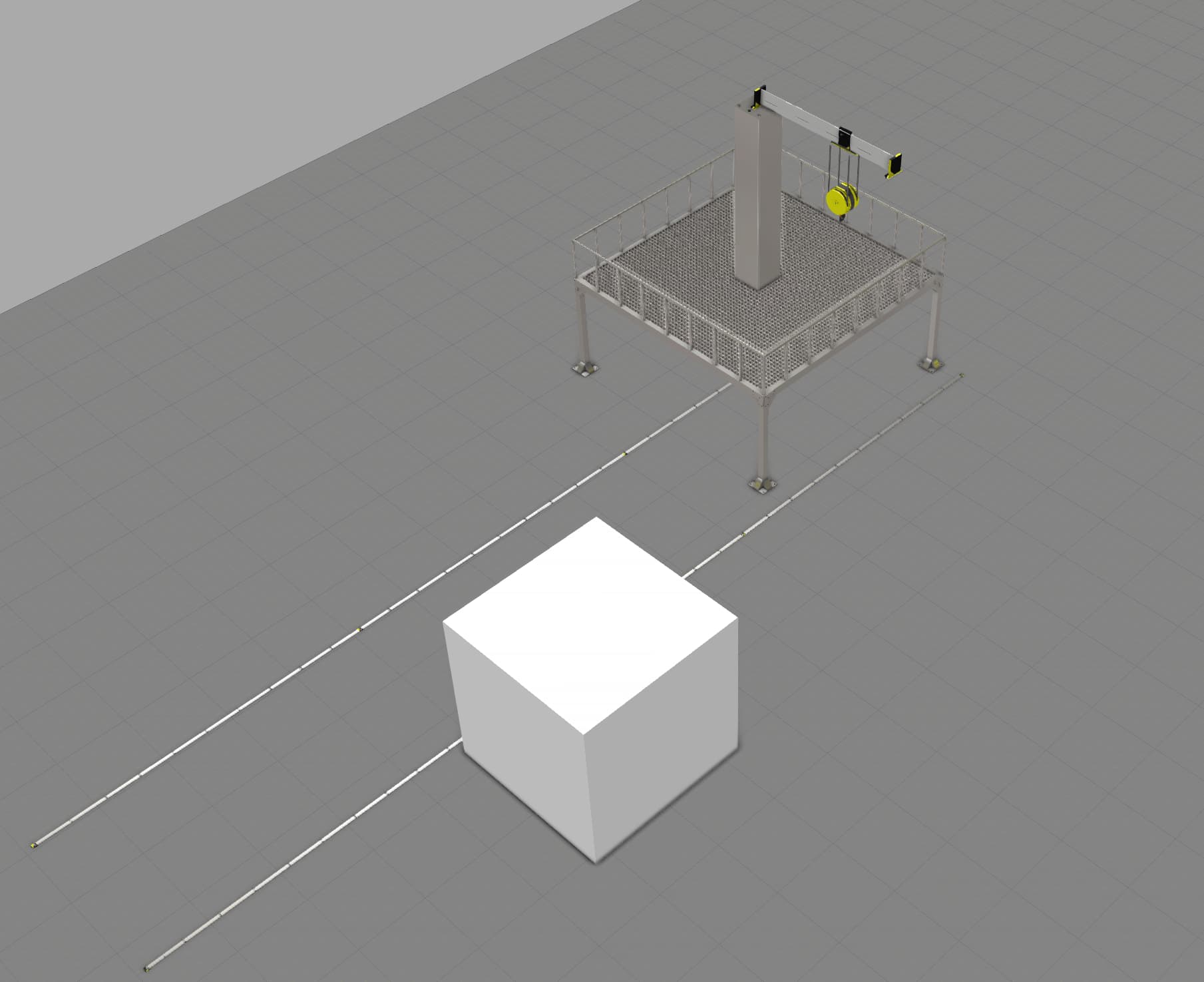
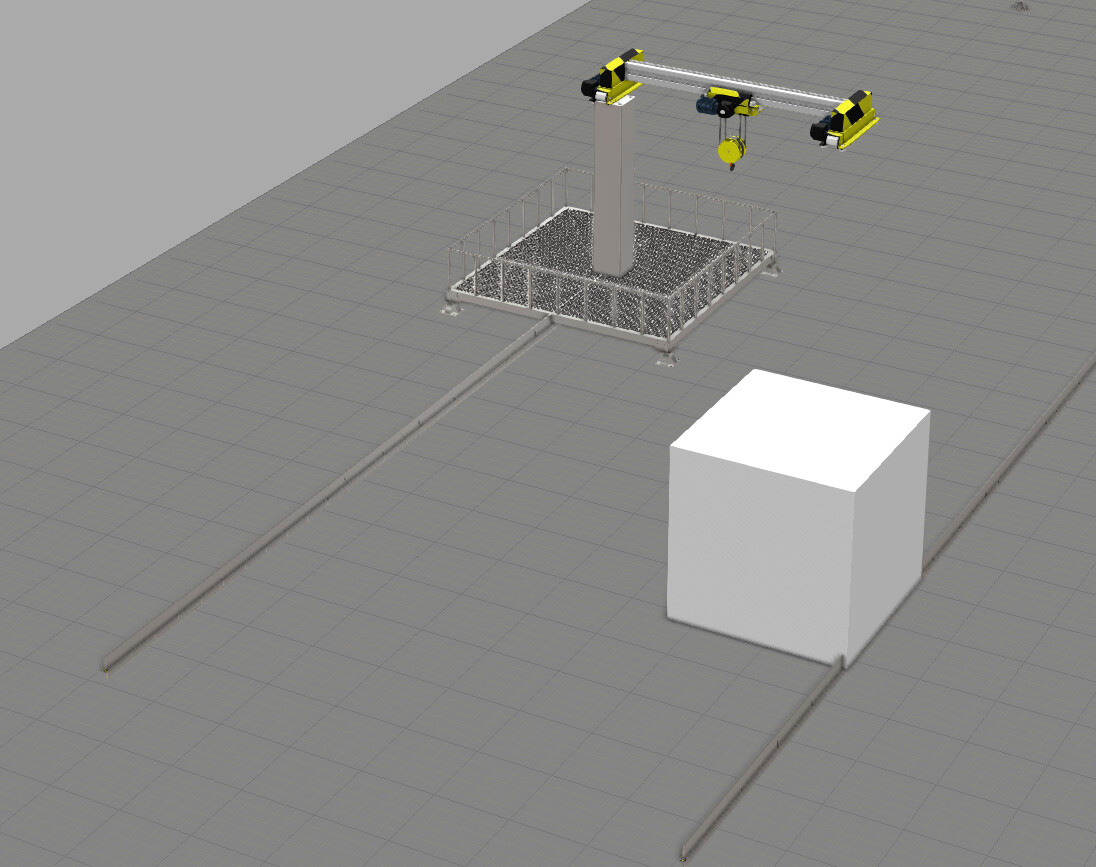
Attached a simplified form the platform incl. crane should move to the white block and stop without crane movement
The process is as follows: my transfer table is at the top.
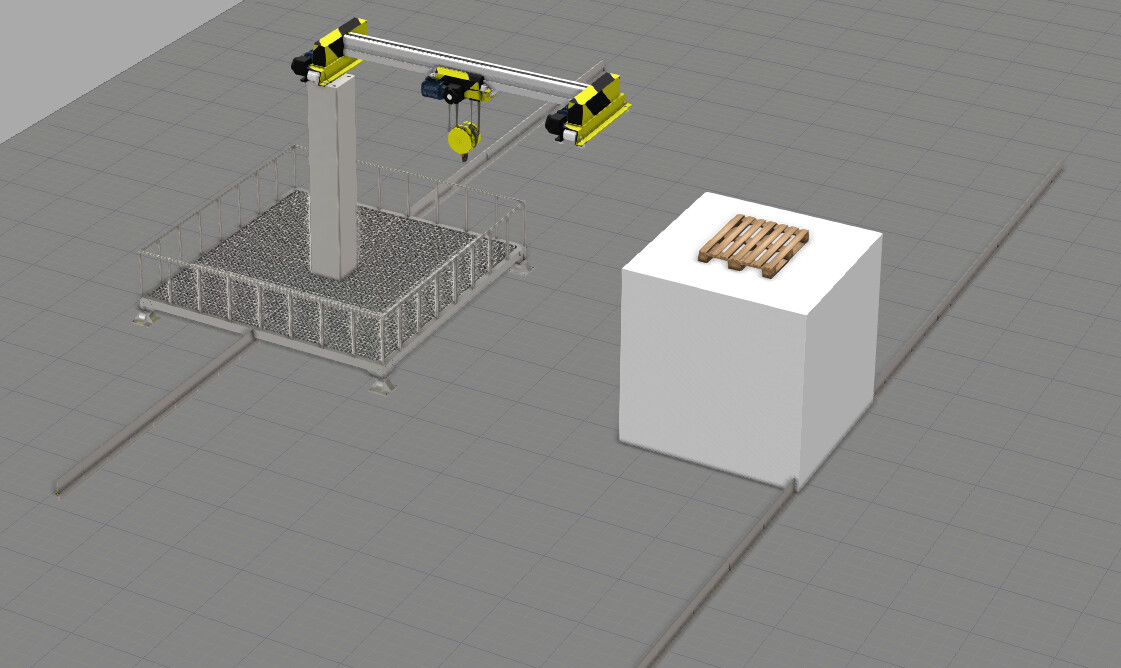
The white block is my delivery station.
As soon as a part has been delivered to the delivery station, my platform should move linearly along the rail to this station.
But without trolley or hoist movement.
okay, another possibility would be to add a small agv to the stage, right? and let it move. The crane doesn’t have to have any function, it’s just that the layout looks like it does in reality and I wanted to control the stage with it.
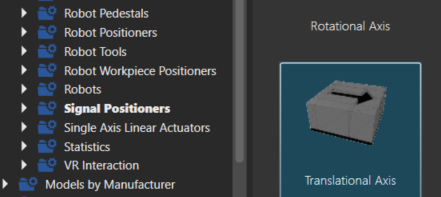
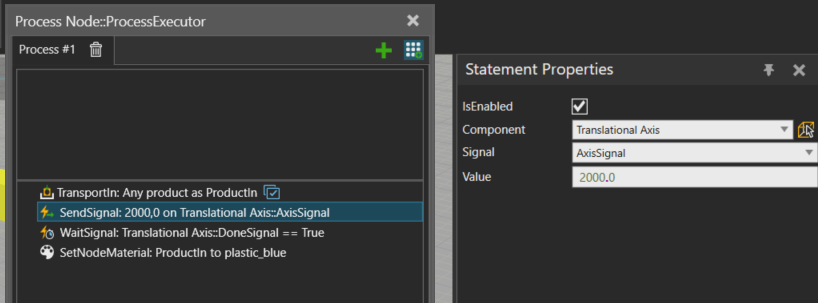
I’m not sure to understand your question, but to use the Translational Axis, you can use the “Axis Signal” mode and in your process, use a SendSignal to activate it. It’s a Real Signal, so you can write the distance you want it to move like : “2000.0” (you need the “.0” for it to recognise the value as a real value.)
Thank you very much for your help, unfortunately I don’t have tranlational axis component yet. Hope we will get an update soon.
I have tried it with the agv method and for my use case it is enough thanks to all the only problem is that the trolley retracts with the following message: Crane.vcax (3.8 MB)
Traceback (most recent call last):
File “Single Girder Crane::PMCrane”, line 38, in OnStart
File “Single Girder Crane::PMCrane”, line 767, in init
AttributeError: ‘NoneType’ object has no attribute ‘Value’
Traceback (most recent call last):
File “Single Girder Crane::PMCrane”, line 62, in OnRun
File “Single Girder Crane::PMCrane”, line 344, in execute_idle
AttributeError: ‘CraneConfig’ object has no attribute ‘track_offset’
I think the component Translational Axis was in the file “Robot Workpiece Positioner” in the previous versions of the eCat.
The messages you get are due to the fact that the Crane is programmed to work with a TransportController. If you want to use just the static geometry, you could either delete the non-necessary behaviours in the Modelling tab, if you have access to it, or you could export the geometry and import it again. In this case it wouldn’t have any properties or behaviours.
I don’t think there is a default way to implement different speeds for different products. However, if you add the different products to new flow groups, you can change the pick-and-place time for each transport link to make each flow unique.
Anything is possible if you modify the Python scripts in the transport controller (or whatever other logic you have) controlling the crane. It would need to read some product property (I assume weight) from the product that is being handled and adjust the motion generation based on that.
Without Python you could try changing them with the GetProperty and Assign statements.
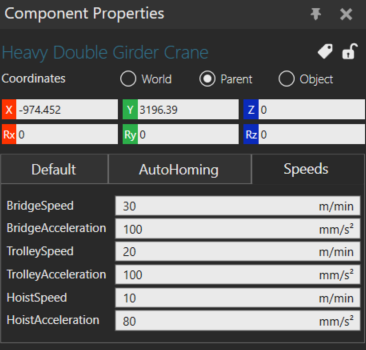
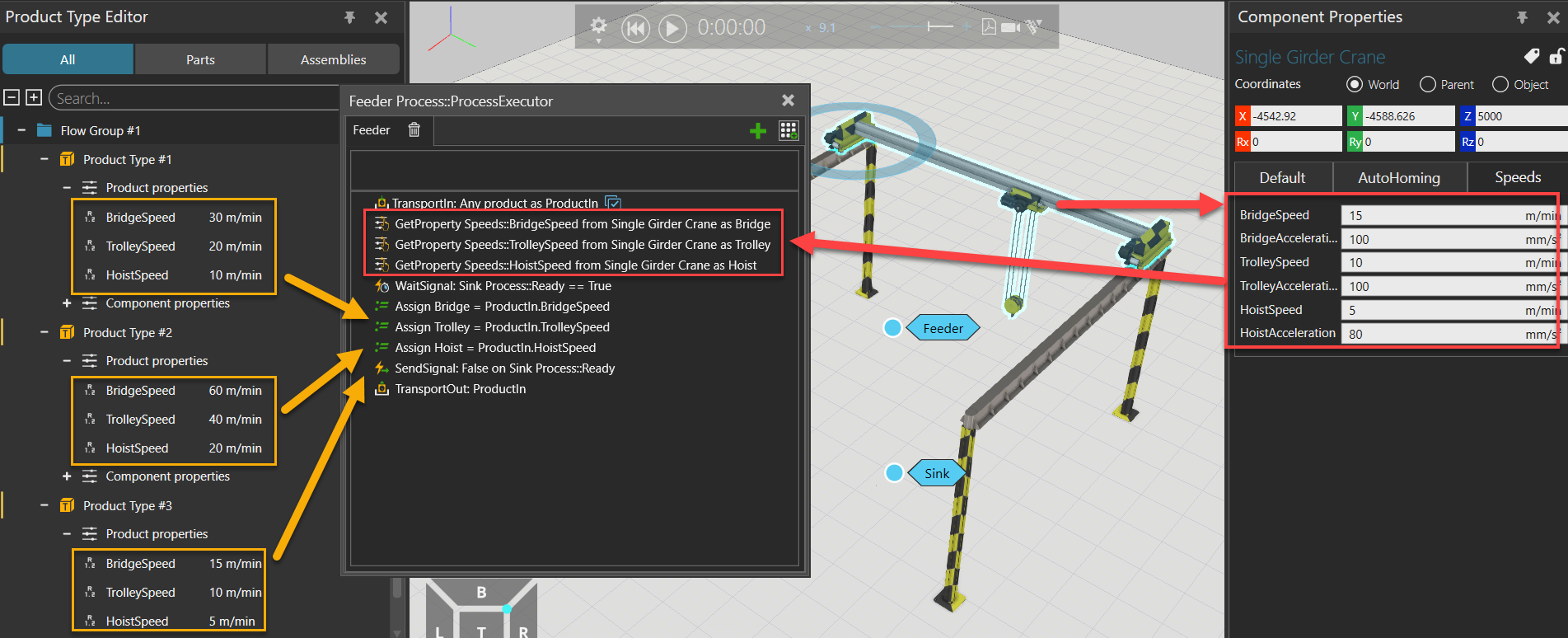
I did an example with 3 products, in which I created Product Properties for the different speeds and I assign them to the Crane before the TransportOut. I also used a signal to make sure that the previous transport was finished before changing the speed.
It’s a standard Feeder from the Flow Components file in the eCat. I just got the properties of the crane with the “GetProperty” statement, which allows me to change it’s property
In the process editor, when you open this routine, you can select the statements and configure them in the property panel on the right side. Look how it’s done in the example I sent.
The expressions are written in the form < ProductVariableName >.< PropertyName > in the case of a product property or < ProductVariableName >.Component.< PropertyName > in the case of a Component Property