Hi all,
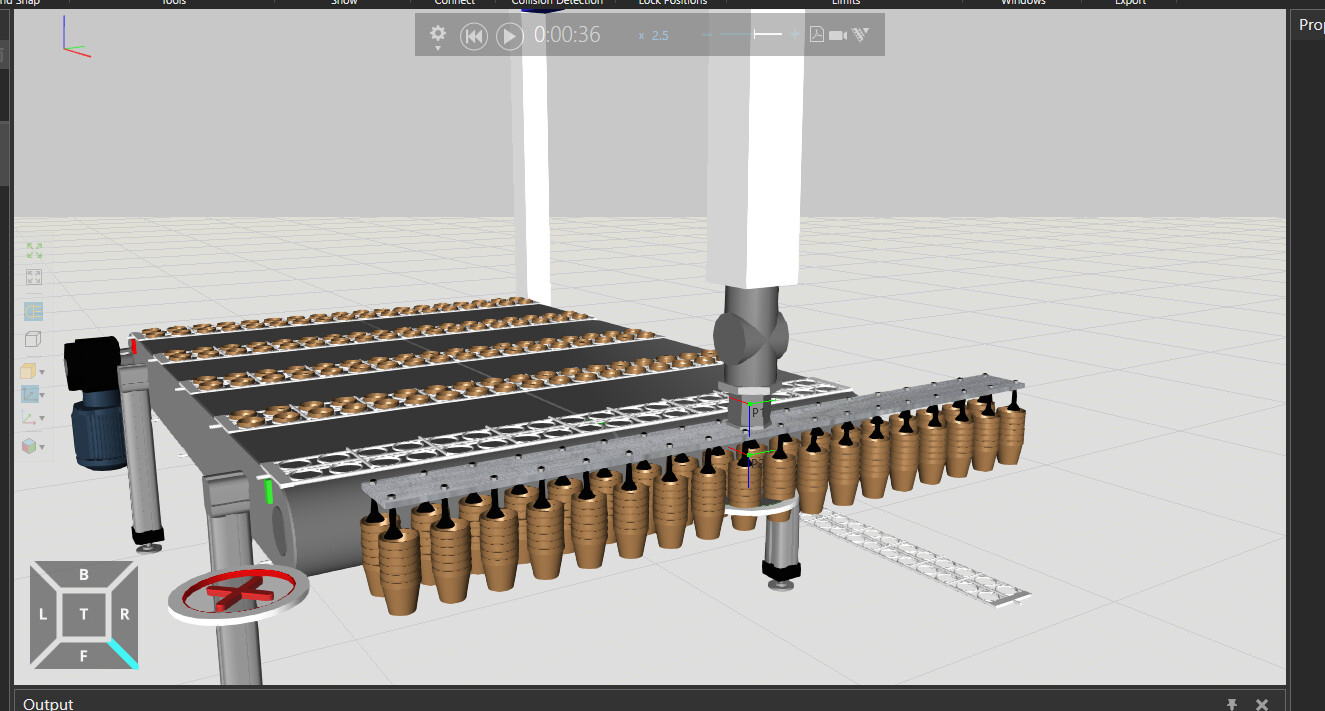
I’ve got a cartesian robot with a 2x18 suction cup gripper. Currently, using PM, I can pick up all 36 cups, then build assemblies at a process node. As seen in the picture, it will build 36 different assemblies. However, I would like it to only build 18 assemblies, i.e. the first row of suction cups would drop the parts, then the second row of suction cups would continue the assembly. Is it possible to do this using PM? New to VC, so any help would be appreciated.
Welcome to the forum @markus506!
You can try to split your 36-Cup-Product-Type. Create an 18-Cup-Product-Type and join 2 of those in an assembly (Step #1 and Step #2). At the separation-process you can then extract one of the 18-Cup-Products.
Here is the course for Assemblies in Process Modelling:
I hope this is what you meant and that this helps!
2 Likes
Hi Cassian,
This kind of works. I made an assembly of 18 each, then a final assembly of 36 (2 rows of the sub assembly of 18). The issue I am having is I would like to pick up both rows at the same time (both sub assemblies) but stack them 1 after the other. Currently, it will stack 1 row after the other, but it is only picking up 1 row at a time. I’m not sure if this can even be accomplished with process modelling. Would perhaps a custom routine written for the robot, along with signals to release a certain row of suction cups potentially work?
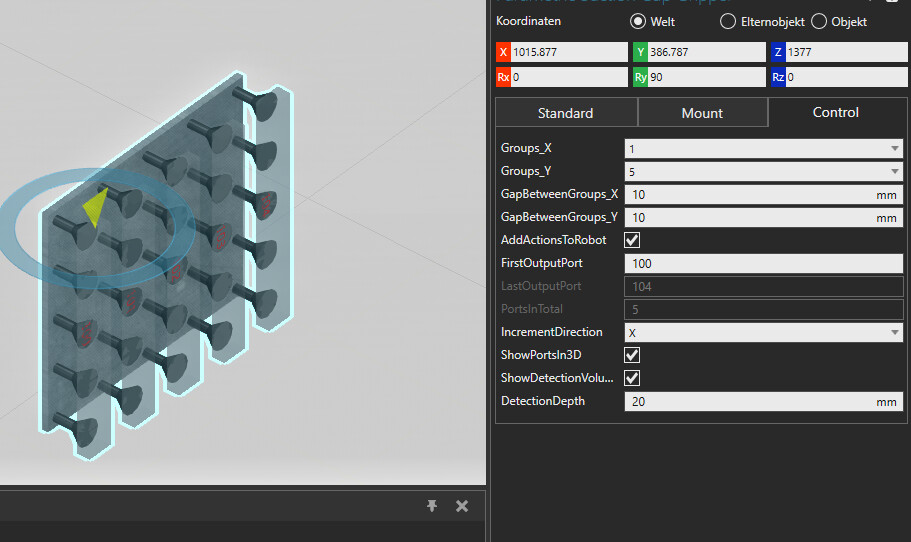
You could try using robot programming only. That way you can grasp individual components. Keep in mind, that the suction cup gripper has this special ability, that allows you to automatically create multiple grasp zone (detection volumes):
Use this tutorial to get started with pick and place tasks in robot programing (aka not Process Modelling):