Hello,
I am really sorry if problems from my project appear so often here but I do not know any guidelines to fix such specific matter like this.
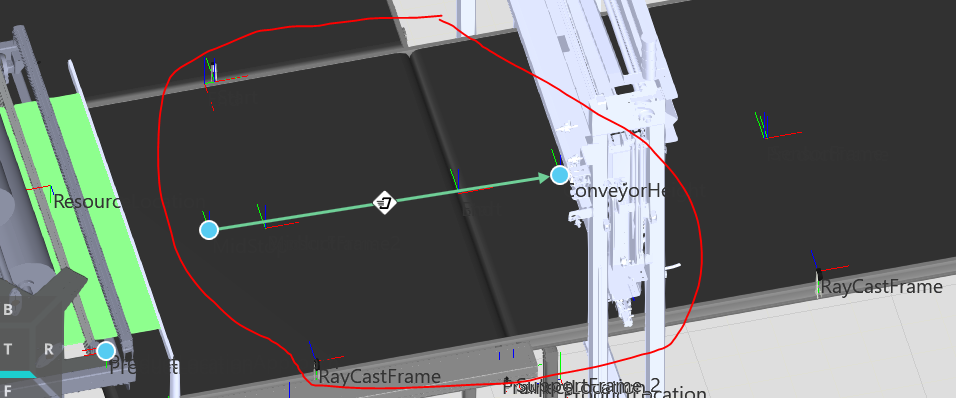
I want the operation motion between 2 conveyors here to be somehow synchronous, which means if one is transporting the pallet, the other should do the same. Although I have adjusted executors on 2 machine processes so that one will not transport the pallet until the action on the other is done, in picture 2, the pallet in red circle still moves earlier.
In my opinion, I think that is because I set the TransportOut of the first executor as “To Next Process” and TransportIn of second executor as “From Previous Process” so the first executor waits until the the second finishes it cycle then starts to transport the new pallet.
Please help correct me if my guess is wrong and give me some advice on how can control the synchronous
movements on these conveyors, such as connecting any signals, etc.? Thank you very much. The simulation can be found here: robot1_1.11.vcmx (17.7 MB)
Hello,
Thank you very much for your advice. But can you help tell me more about control the path behavior with logic? I know there are one-way and two-way path behaviors but I do not understand fully about the concept of controlling it.
Thank you very much.
Something like this. The conveyor components have a ready-made signal but you can check from the component how that makes the path start and stop if yours doesn’t. Conveyor control example.vcmx (238.3 KB)
Hello,
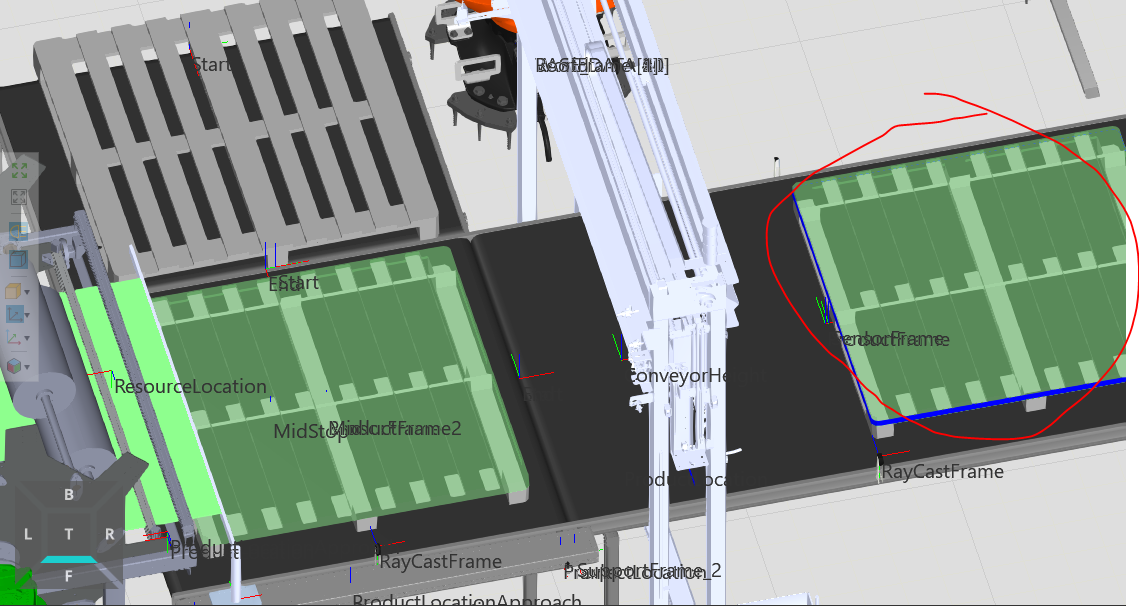
I understand your idea. Thank you a lot for your kind help. As you can see here in the picture, it is quite clear that since I have made the second conveyor to wait until it receives signal from the first one, they seem to both reach TransportOut at the same time. However, the pallet on second conveyor still moves first (in the picture it is already offset from the sensor middle position) while one on first conveyor is on standstill.
Hello,
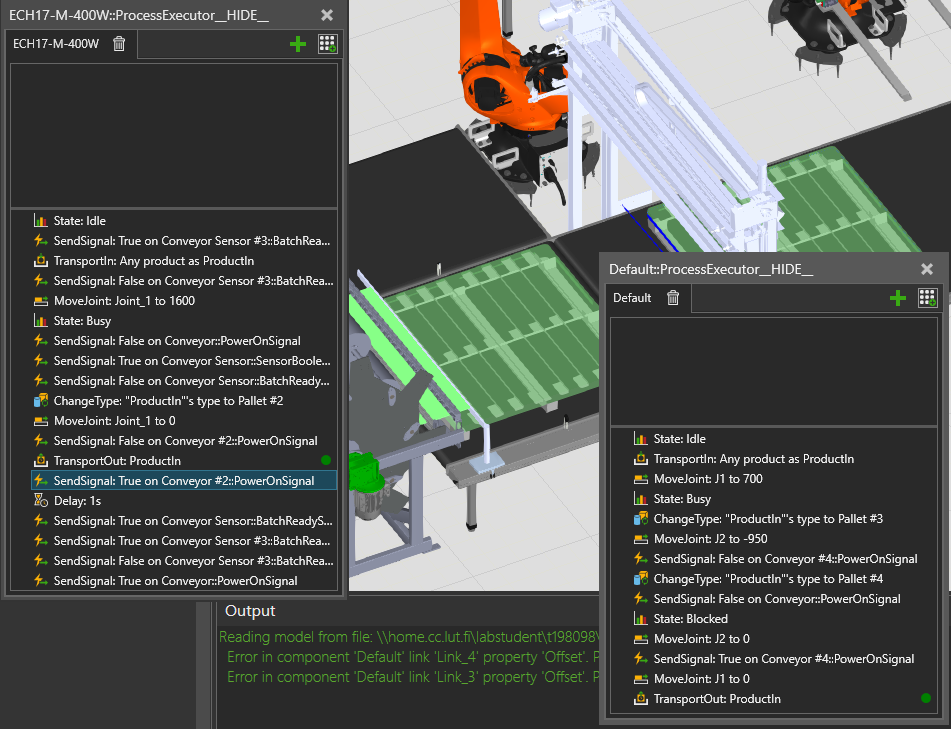
Updated: I think it is true now because I set the TransportOut “To Next Process” and TransportIn “From Previous Process”, the first conveyor must wait until the second one moves some distance before it starts to move. Here when I want to send signal True to second conveyor PowerOn after the first one has transported out the pallet, the process stops.