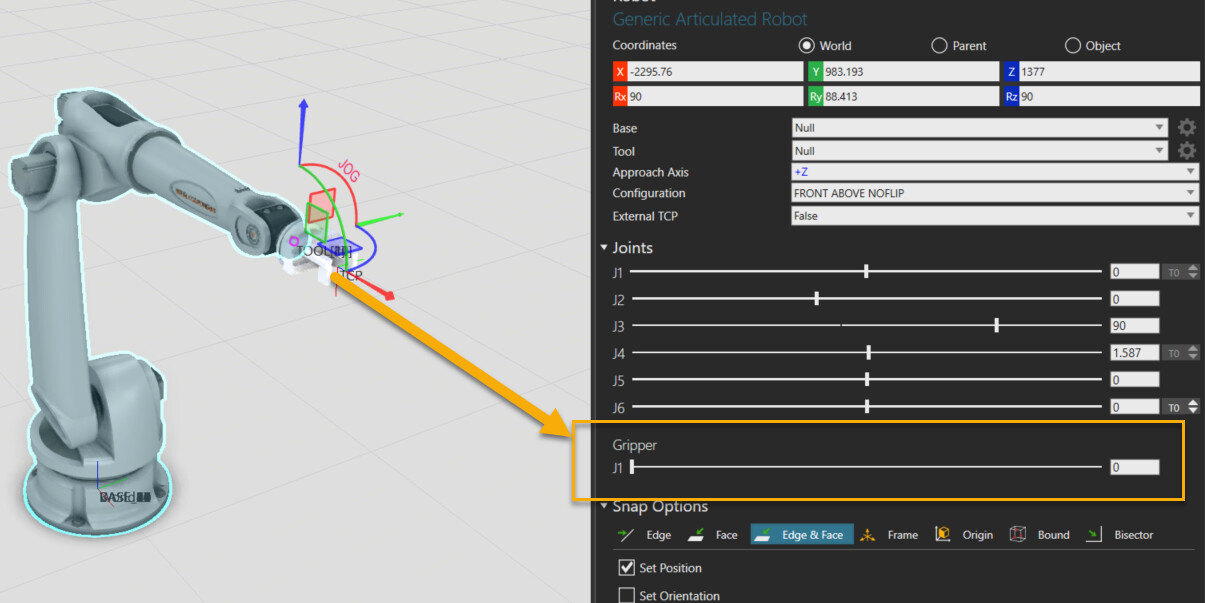
I’m struggeling by try to make a gripper which opens the possibility to control it’s axis by robotprogram (teach axis positions as external axis in PTP or LIN moves).
My first approach, by simply export the servoaxes of gripper in the available standard-interface of the gripper doesn’t make the wonder…