Hi,
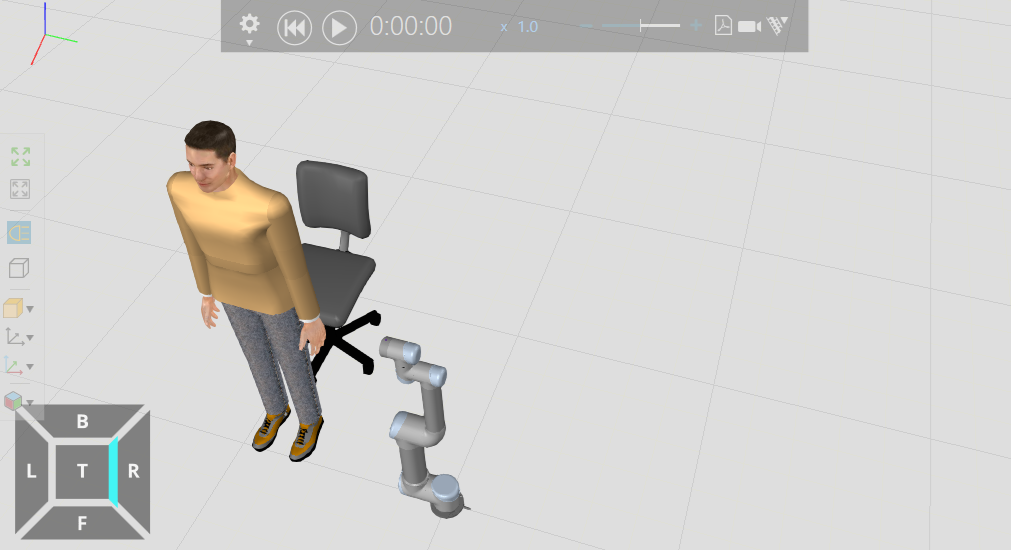
I am working on a robotic rehabilitation project and I pretend to do a simulation of a certain upper limb movement, using the UR5 robot. That movement involves the human being seated in a chair and having his hand connected to the extremity (TCP) of the robot.
Is it possible to sit Otto in a chair and connect his hand with the TCP of the UR5? If yes, how can I do it?
Thank you in advance
Well Otto can be programmed like a robot (if you select him and switch in the programm tab, you can see some programs for his standard movements.
To make the robot move his joints, maybe this would help : Human inverse kinematics - FABRIK Algorithm
1 Like