Hello everyone.
I would like to construct a demonstration line in which the link of A’s component gets the location information of the frame configured in B’s component.
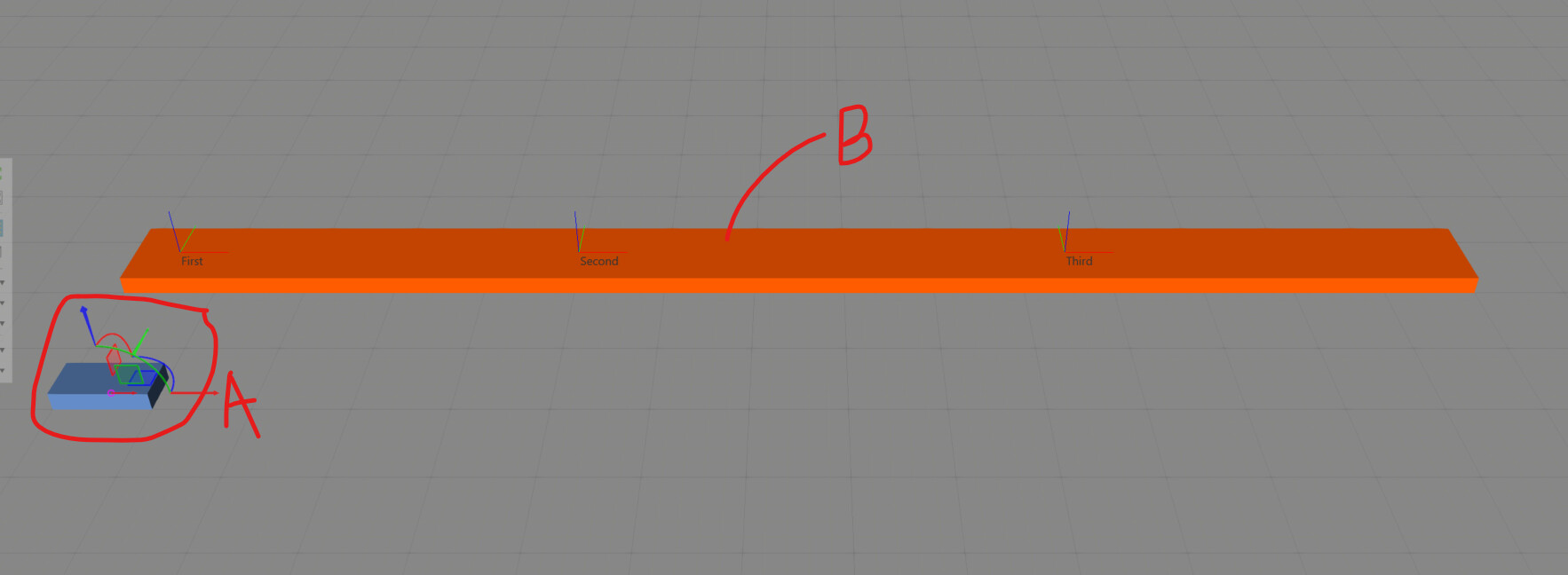
The configuration is as follows.
- Get the frame position information of First to Third of B from the Python script of Component A. EX) Frame position information of Third
- Compare the location of the link in component A with the location of the Third frame in component B.
- Calculate the world coordinates of link A and the world coordinates of the Third frame of B to calculate the value to move link A.
- Link A moves by the calculated value.
I look it up in Help File, but I have difficulty getting the world coordinates of Frame.
Is there anyone who can help me?
Best regards,