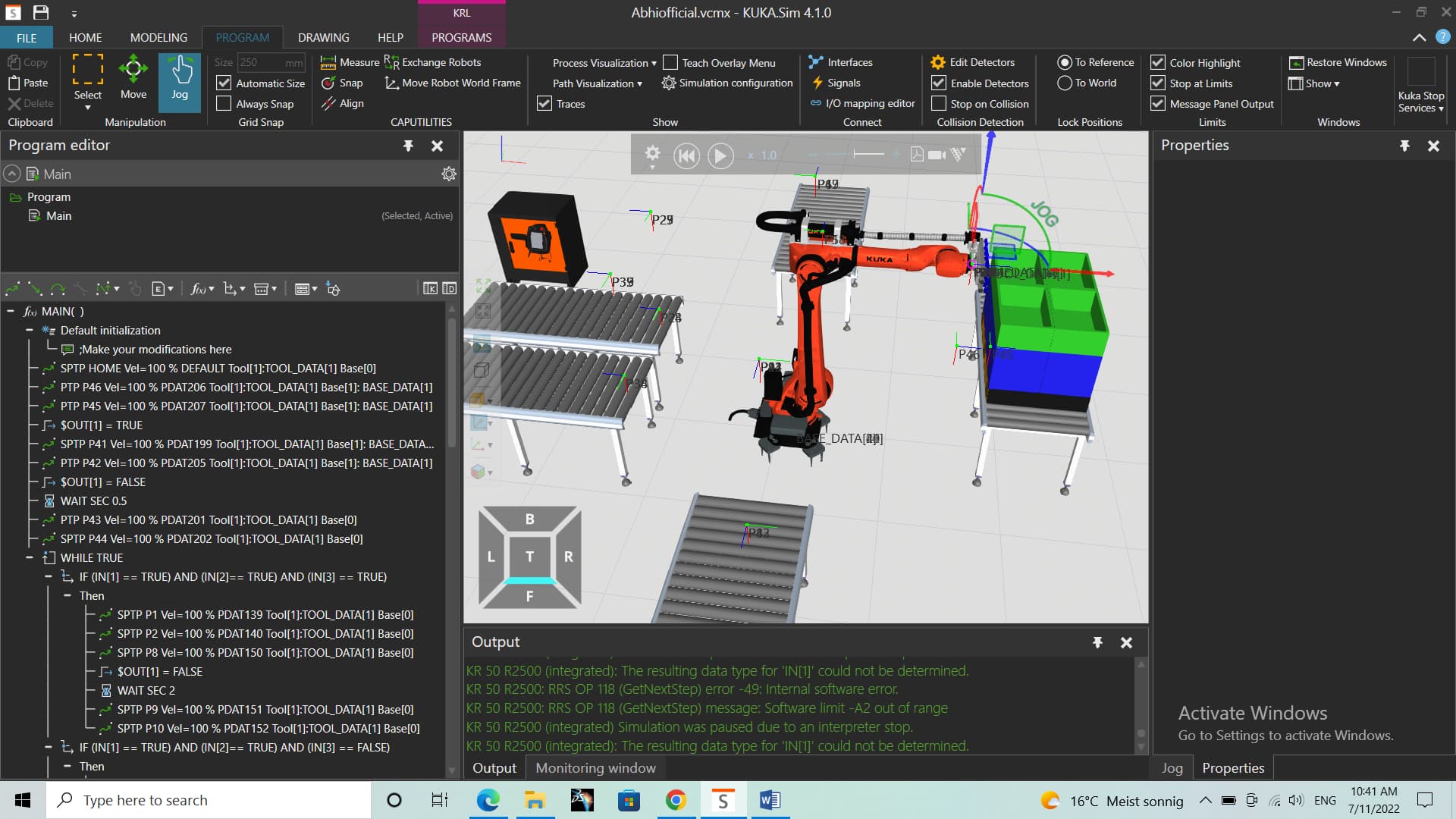
I am doing robot pick and place robot programming in KUKA.Sim software. I have one question about programming. I have to pick 8 boxes one by one from different positions. And therefore
I have 32 different positions of boxes as I have 4 different possibilities of stacking boxes. To pick the box, everytime the box coordinates are received from Camera to PLC and PLC to robot. so, my question is, how can I write a function for that in KUKA.Sim software?
Howdy. Good question. I know that variables and global points in the project are not exposed in the Connectivity tab for easy pairing and read/write functions. For example, you cannot pair PLC variable to POS variable in your program using the OPC UA connection plugin. I also do not know if there is anyway via API to do this.
A possible workaround, if it is available to you is to connect to and run the program in OfficeLite or real KRC and have the PLC connected to that controller to update the variable. On Program tab, Show group, click “Simulation configuration” to see option for connecting to controller.
I will ask a colleague about this since it has been a long time since I have used mxAutomation, for example.
I am searching also to recieve an object position from a camera and transfer it to kuka.sim.
I think the information of position and the photo itself is stored somewhere so it should be copied but I still do not know how. Any idea how? Thanks a lot.