Hello,
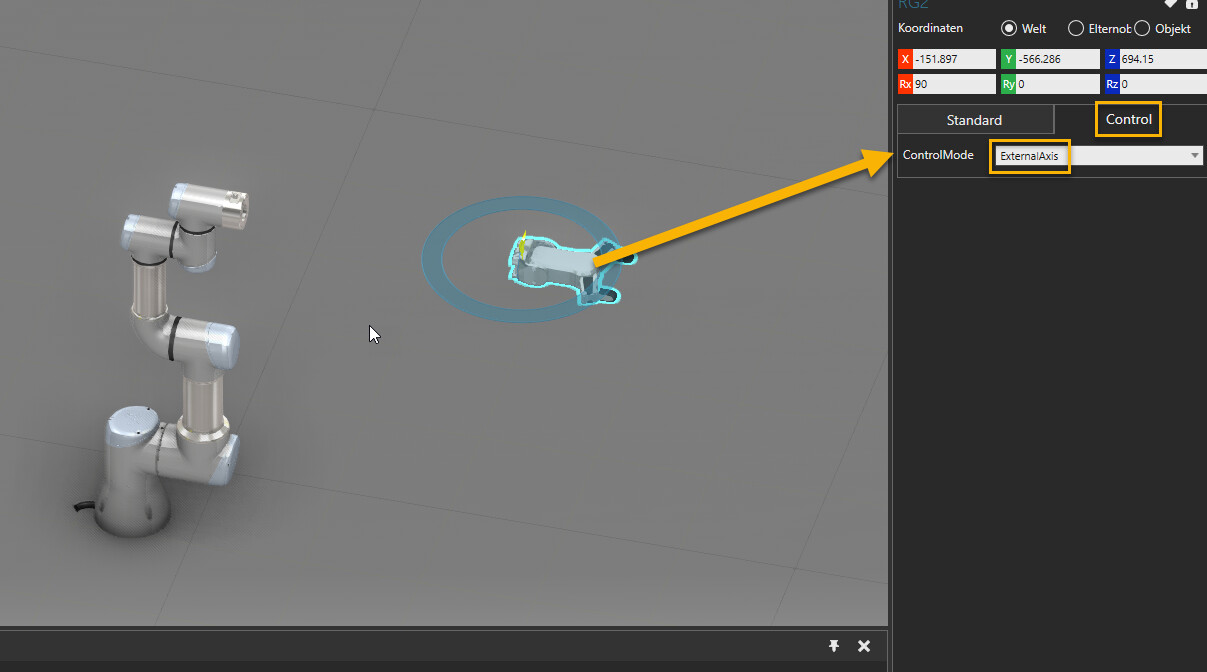
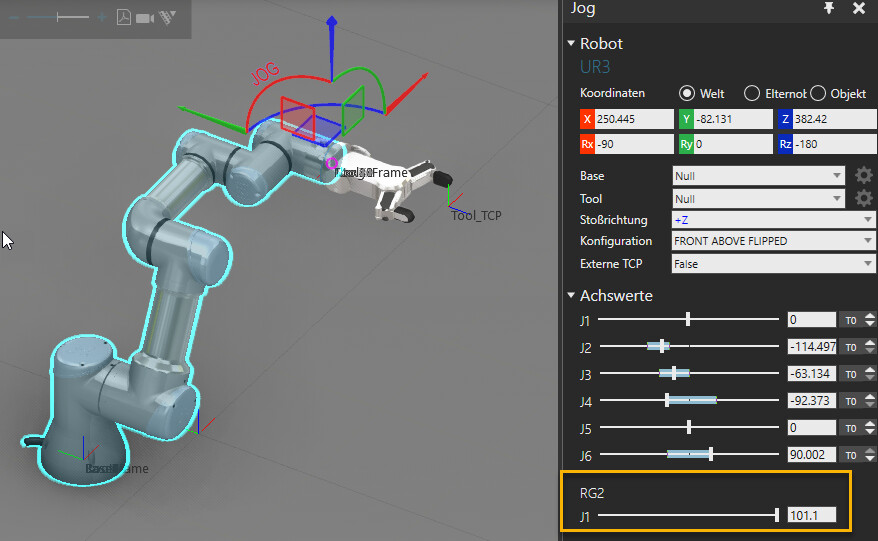
I’m currently working with the UR3e and the OnRobot RG2 gripper in Visual Components. Under the tool’s Component Properties, I’ve noticed that the Default ‘J1_ClosedValue’ is set to 40. This seems to be the value used by the gripper to seize objects as needed. However, due to this being the default setting, when I invoke the “set binary” function, the gripper only closes to this 40 value.
I’m looking for a method to fully close the gripper on demand. Would it be possible to achieve this by setting ‘J1 = 0’ via the Assign function? I would appreciate any guidance on how to alter the closure degree of the gripper beyond the default settings.
Thank you in advance for your help.