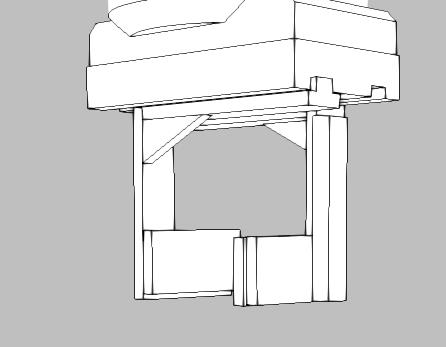
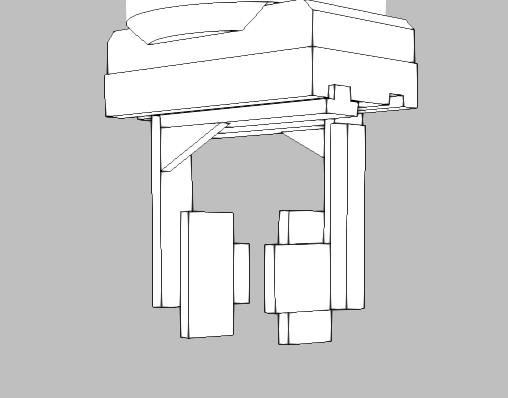
My self-built gripper model, after gripping the workpiece, the workpiece can’t rotate with the rotation of the gripper. How to solve it?
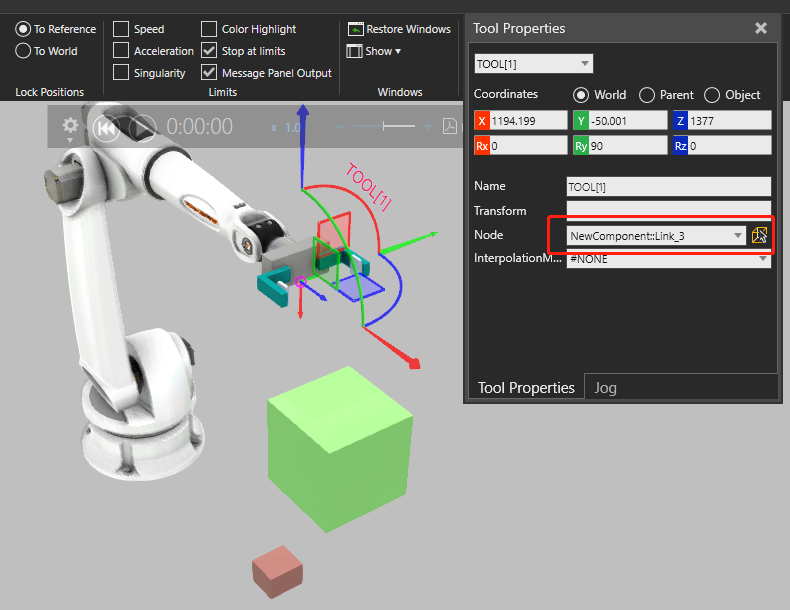
Maybe you can have a try, to Attach the Robot’s Tool Frame to the node which rotate in the gripper .
Sorry, I didn’t express myself clearly.
Can the assembly be set as a rotary positioner at the end of the gripper and drives the clamped workpiece to rotate together?
I understand.Check the attachment.
Note that the grasp Tool must be attached to the rotate link in the gripper.
Test Layout - Rotate after Picking.vcmx (669.0 KB)