I am trying to create a gantry machine using the cartesian kinematics behavior. I am able to define the forward kinematics. I created the tool and base frames within the controller container. However, when I try the inverse kinematics the behavior is not in sync. The TCP position seems to not be at the defined position. Any help on this would be really helpful?
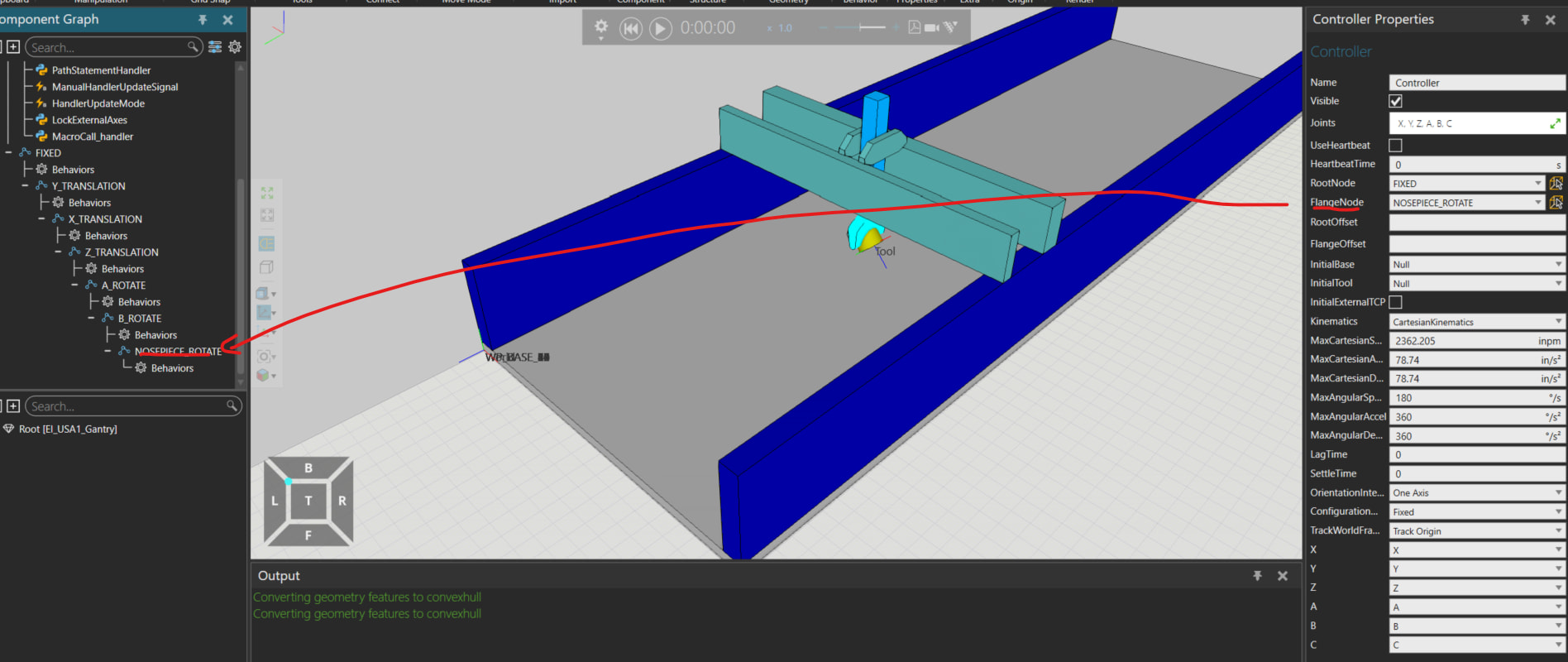
Check that the Robot Controller behaviour’s FlangeNode property is the last link of the kinematic chain. That’s something that often is wrong when modeling a robot from scratch and can cause something just like this.