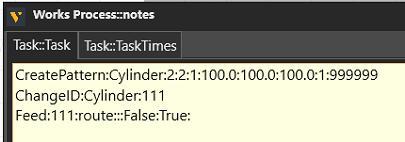
I’m learning the mobile robot lesson “Attach and Use Arm with Mobile Robot”. The robot cannot pick all the part. Following is the works process with feed task:
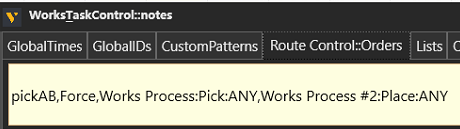
and the task control route
Attachment is my test file. Is anything is wrong ?
For picking up multiple individual components from a process one at a time, you need to use RouteControl like you have done, but you need to define multiple Pick steps (and Place) in the route definition. For that, there’s quite recently added syntax to have it in a compact form as follows:
pickAB,Force,Works Process:Pick:(ANY,ANY),Works Process #2:Place:(ANY,ANY)
which is equivalent to:
pickAB,Force,Works Process:Pick:ANY,Works Process:Pick:ANY,Works Process #2:Place:ANY,Works Process #2:Place:ANY
To be very pedantic here it’s not 100 % the same, since Pick and Place steps are first calling “Move” task in the resource to dispatch the resource to the process location and after that Need (Place) or Feed (Pick) is called. This means that the shorthand syntax is not calling “Move” in between the Needs or Feeds as it is, when typed in separately. But, in most cases the “Move” in between is unnecessary and the end result is the same, but maybe in some rare cases e.g. where the resource location is changing between picks, it may have an impact.
Thanks, jouha. Multiple Picks step can solve this problem. Maybe something is disappeared in the vedio “Attach and Use Arm with Mobile Robot” from about 7min.
@Debbie No, nothing disappeared in the video. About half of the video involves troubleshooting and fixing potential issues for a reason. For example, the robot might be positioned wrong, the vehicle might not have capacity, the route is not configured properly, feed and needs mismatched, etc.
You are doing a good job of using the forum to ask questions. And I appreciate your resolve to work through these issues.
The course, its lessons, layouts and components were made with 5.2 version of Works library. The layout used in the lesson can be downloaded from the academy, and used to complete the lesson. Note that all of the course files can be downloaded and are mentioned in this forum post.
I have not opened your layout, but if you took the components from the eCatalog, they are most likely 5.3 or higher version of Works library. There are differences between 5.2 and 5.3.
What does that mean? In the lesson’s table of contents, click 11. Create pattern and simultaneous feed. Notice that the Simultaneous check box of the Feed task is enabled. Now, starting from 11:30 in the video you can see the robot is able to pick up more than one part using the route in your original post.
As @jouha mentioned, you need to specify the number of picks the robot does at a station in the route. And that is what you need to do with 5.3 or higher version of Works library when defining a route for the vehicle. In 5.2 version there was a bug that allowed you to workaround this, but it probably caused more problems than it solved, so the bug was fixed.
@zesty, thanks for your patient explanation. The works library I use is really v5.3. Now it’s entirely cleared.
Another topic, if there are many works libraries、mobiles robots and humans, the tasks may be complicated. Several logic errors hide in the process. During the simulation, the component with mistake only displays without my imagination.Sometimes I can not find out which task of which component is the wrong one especially in the simulation. If there is a flow chat of all components which is dynamically changed depends on the progress of simulation, it may be more intuitive. Or there is other ways to help for positioning the problem in vc ?