Hi all,
I was examining the ‘CandyPickingAndPlacing’ layout from the VC-library.
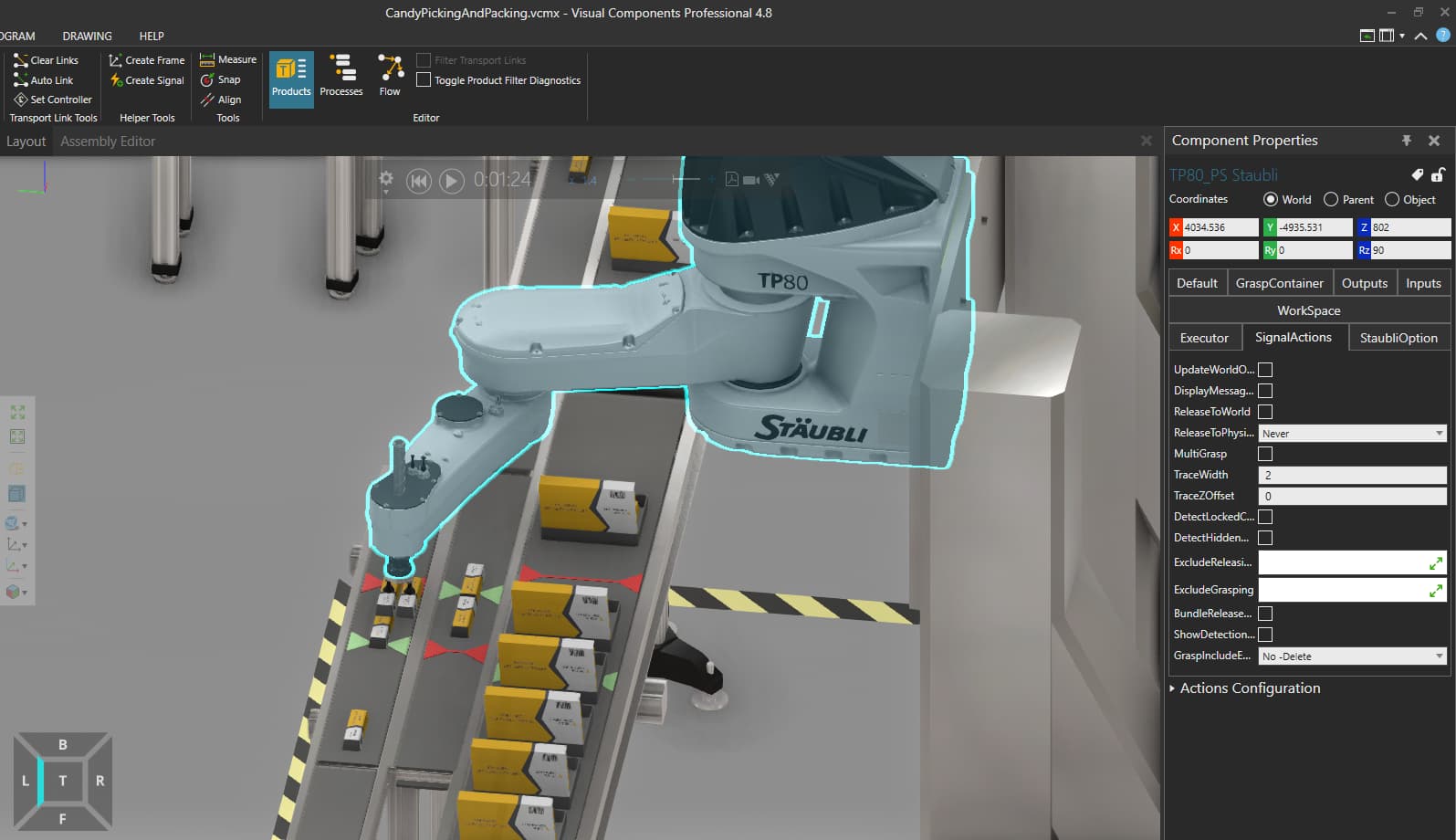
Can anyone tell me how they have the robot pick up multiple candy bars at once, while the option ‘MultiGrasp’ is not checked?:
CandyPickingAndPacking.vcmx (9.1 MB)
Hi all,
I was examining the ‘CandyPickingAndPlacing’ layout from the VC-library.
Can anyone tell me how they have the robot pick up multiple candy bars at once, while the option ‘MultiGrasp’ is not checked?:
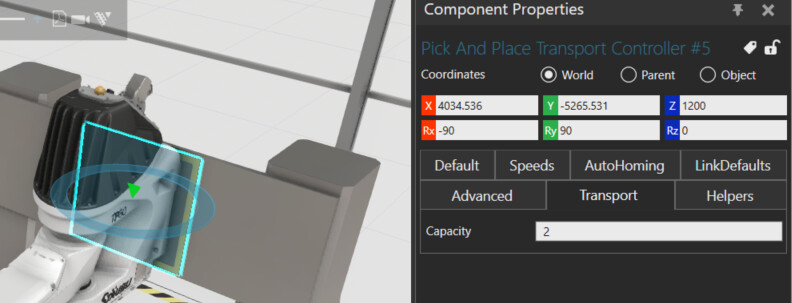
The robot is controlled by a Pick and Place transport controller.
The transport controller has Capacity set to 2, which allows the robot to pick 2 items at once. The transport controller relies on Process Modeling, and you can check more information on the Academy tutorial: Pick And Place Components - Manual | Visual Components Academy
Oh great, I was not aware of that option. Thanks for the effort!