Hello
I have a program and everything is actually working… Im using a robot to grasp components and move it into my machine and back and forth and so on…
But its kindof working too good. - Its aswell as picking the little component… but also the tray that the components are laying in.
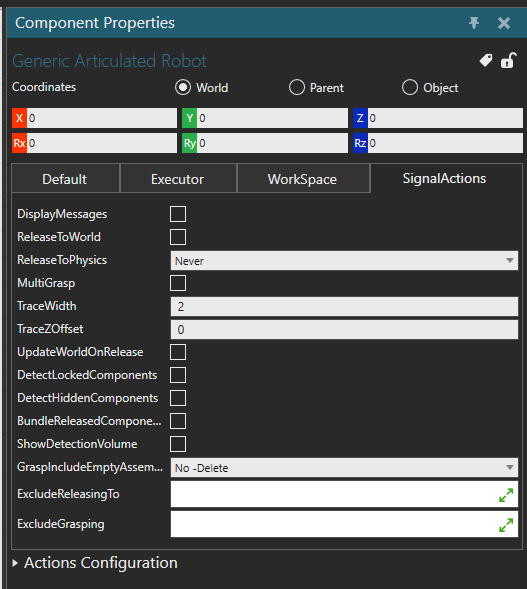
Is a there a function somewhere where you can either choose what material its allowed to Grasp in the Visual components software or exclude components from being able to be Grasped?
Thanks in advance and im sorry if i have put the question under the wrong section
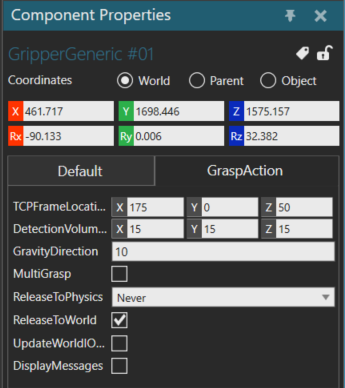
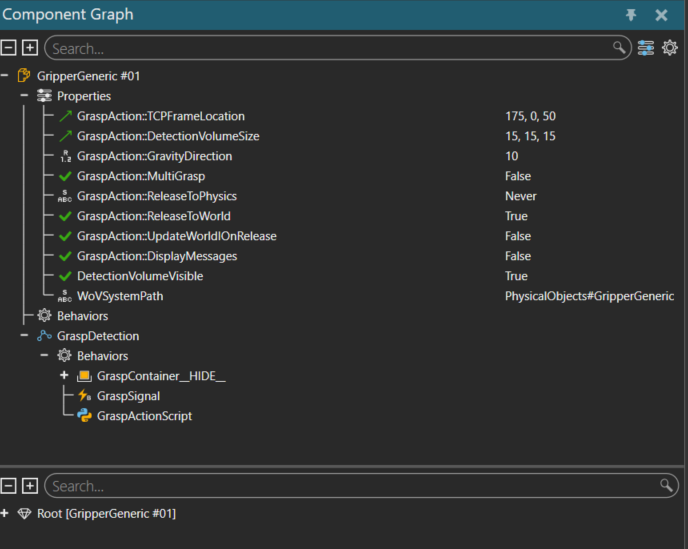
Oh Thank you. Its because i had made my own generic “grasp detection” boxes. Because im using a double gripper… - Therefore i need 2 of these.
I cant seem to find it as a behavior or tool to add to my home made Grasp boxes… Is it possible to use this from SignalActions in 2 places like on a double gripper?
But thank you so much - i will try to see if i can figure something out.
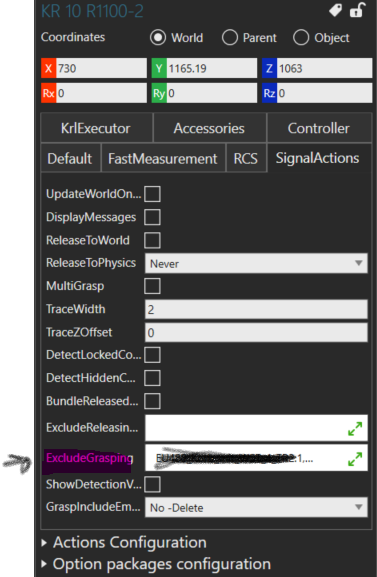
Most of the time, this should be solved by modify each tool’s detection volume, if not, you could try to connect a robot signal to a gripper boolean signal, write a script, before robot pick something, robot triggers signal to gripper, then modify robot’s ExcludeGrasping list.
I believe you are right and it actually worked the first 3 components - then it took the container after the third. I will look into the python script and get some help to modify it! Thank you very much!