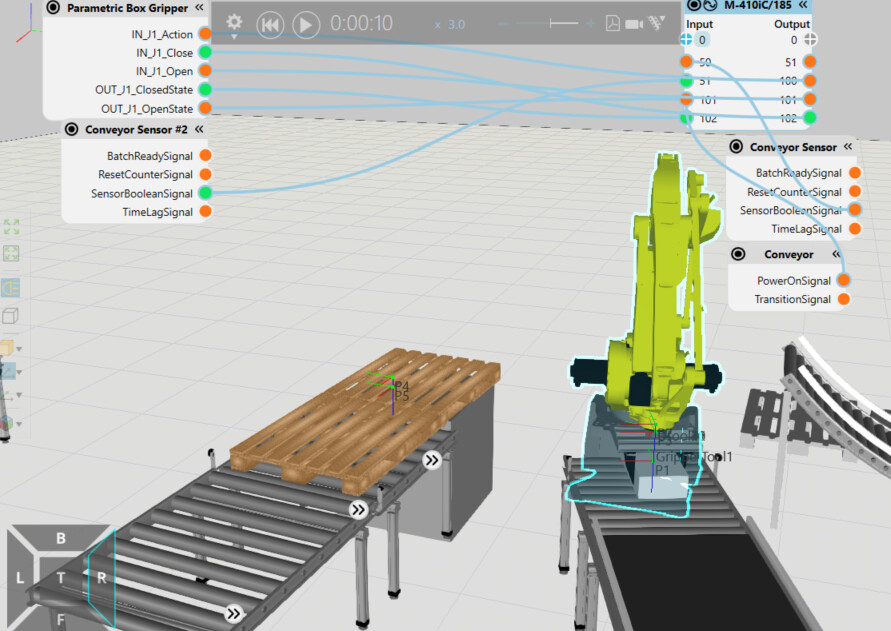
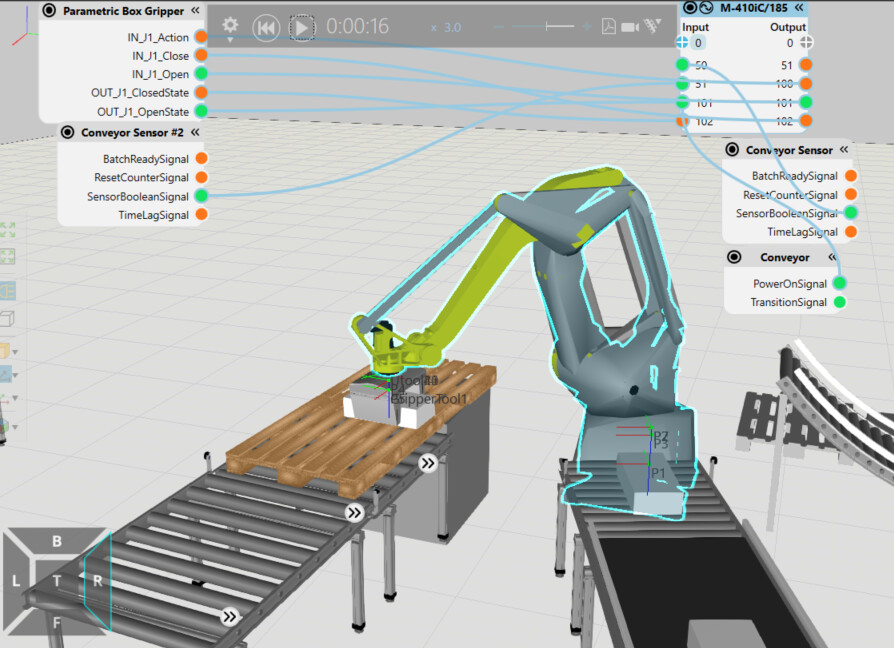
Hey, I’m learning to program industrial robots through Visual Componets and during the implementation of the industrial palletizing process I got an error when opening the “Box Gripper”. I am using the Actions Configuration function to trigger the opening of the gripper - I am giving a high signal to output 102, in order to close the gripper. It works. The robot then positions itself where the product is put down, and I tried at first just giving a false state to output 102, but the gripper would not open. I then added a high state to output 101 to make the robot open the gripper. It worked. Unfortunately, at this point, the program continues to run, but there is a bug and the whole robot blurs.
Hi Maciek, can you share the lay-out?
Hello Visual Component teams,
As i would like to grasp objects with something else than the generic robot tool of the Academy Tutorial, ![]()
could you explain how the boxgripper works. I do not manage to grasp the object even though i use the output[1] which seems to correspond to a grasp action in the properties.
Is there a specific sequence for the boxgripper ? How can i find what each of the signal induces for any tool ?
Thank you for your kind help.
The actual grasping is different from the tool’s gripper closing.
Robots can grasp/lift up components even without a tool.
If you look at your robot’s component properties, there’s an “Action Configuration” section at the bottom. The output IO 16 is by default the Grasp action. So in your program if you set the output 16 to True, the robot will grasp whatever component is in the detection volume.
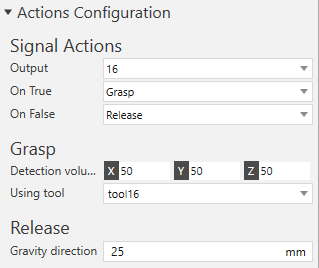
If you still cannot grab anything make sure your detection volume is correct. You can go to the “Signal Actions” in the robot’s Component Properties and set “ShowDetectionVolume” to true to confirm.