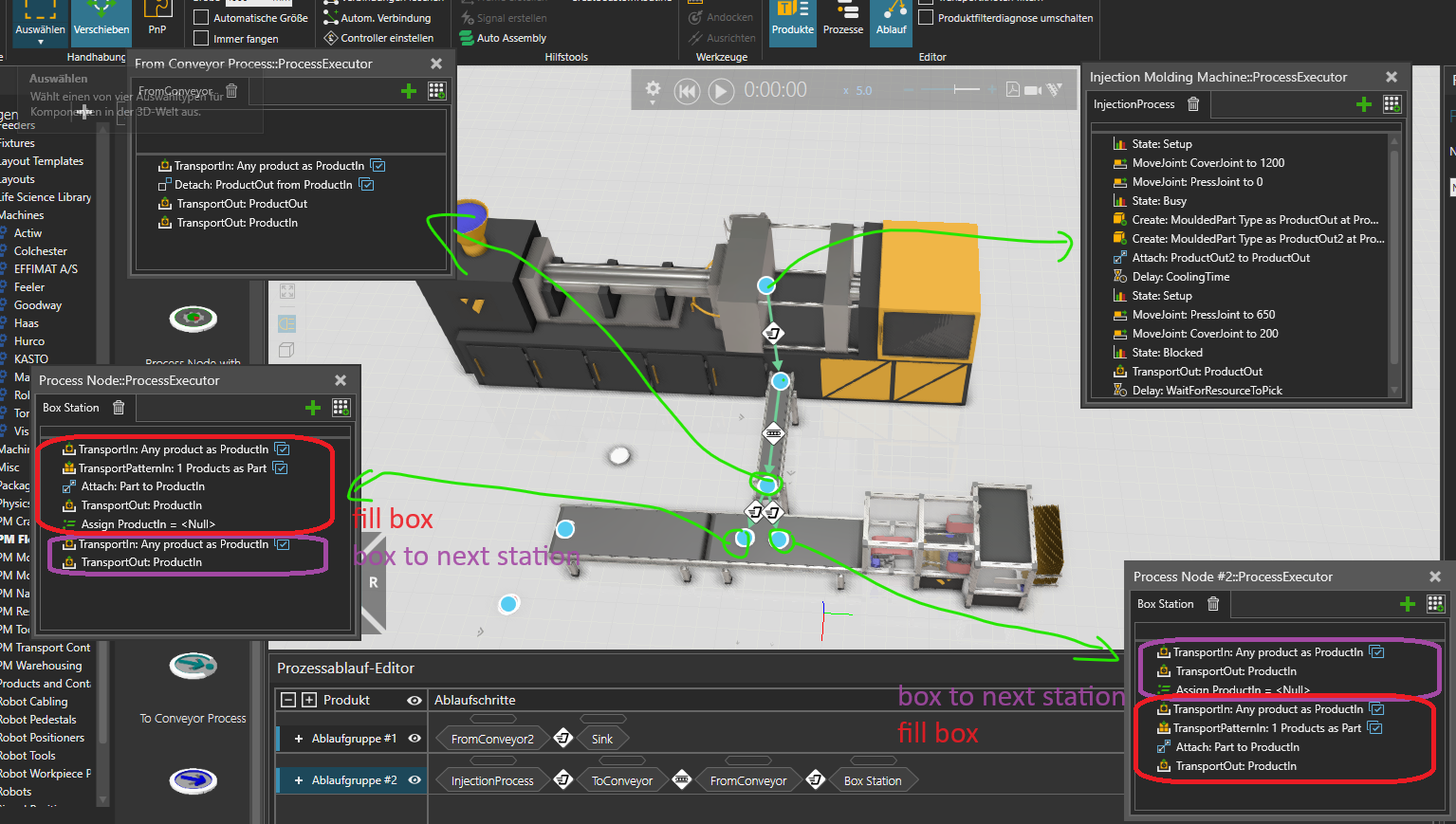
I want to create a combination with a molding machine > Robot > Conveyor#1 > Conveyor#2
Conveyor #1 gets parts from the molding machine
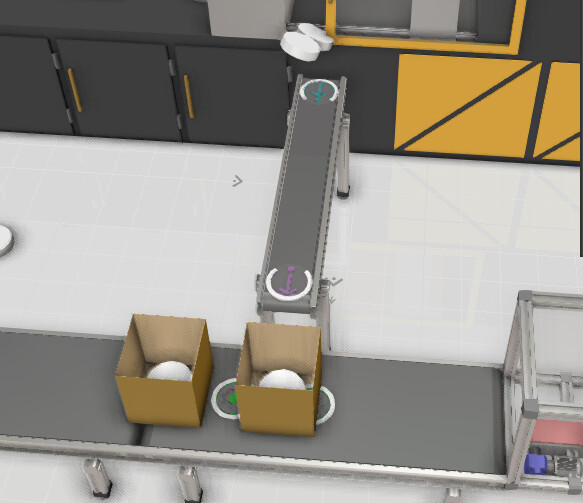
Conveyor #2 is perpendicular to Conveyor #1 and contains Boxes where the parts from the molding machine fall into.
At the moment I placed a Conveyor Sensor to Conveyor #1 to count the parts and trigger a “BatchReadySignal” once the defined amount of components have fallen into the box.
On Conveyor #2 I have another Conveyor Sensor set up to stop the box under the first conveyor.
To restart the conveyor once the “BatchReadySignal” is HIGH it is connected to the Conveyor “PowerOnSignal”
This setup kind of works but my actual molding machine is delivering two parts at the same time. Two mirror components of each other that need to land into two different boxes.
Therefor I need to have:
- Two empty boxes at the input side of the conveyor
- Two boxes that are being filled up in the middle of the conveyor
- Two boxes at the output side of the conveyor that have been filled up and are waiting to be picked up.
How can I create this conveyor that waits for two empty boxes to be present, checks that the output two boxes have been taken away, starts and stops after moving two boxes up to a sensor?