Hi, I am very new to VC, in my project, I need to use a robotic actuator to grab a specific part from a pallet/table, undergo machining, and then return part to the pallet. So using a feeder where an infinite number of parts is produced at a constant rate is not what I need. The pallet can hold up to 25 objects.
Can anyone recommend how I can go about doing this or point me to a video that could be helpful to me.
What component on the ecatalog should I use for this pallet/table?
That seems possible, I am having trouble trying to make it so that components can be picked up one from the pallet assembly one by one by a robotic arm and returned to the pallet once machining is complete any advice?
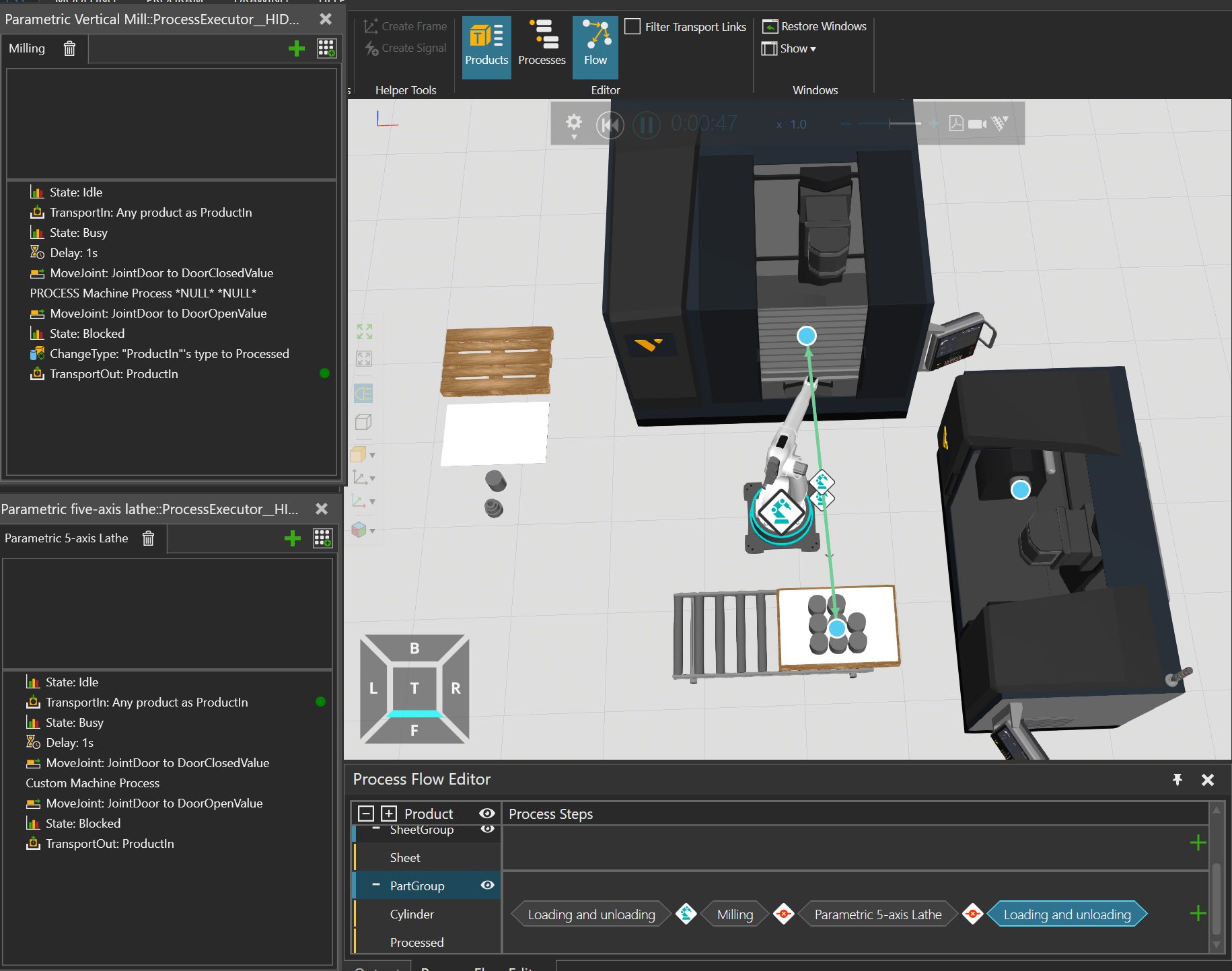
I’ve edited the pallet recycler layout. Trying to get the robot articulator to transfer cylinders from Loading and unloading>>Milling>>Parametric 5-axis Lathe>>Loading and unloading. But robot articulator refuses to interact with anything that is not part of the initial layout. Please help.
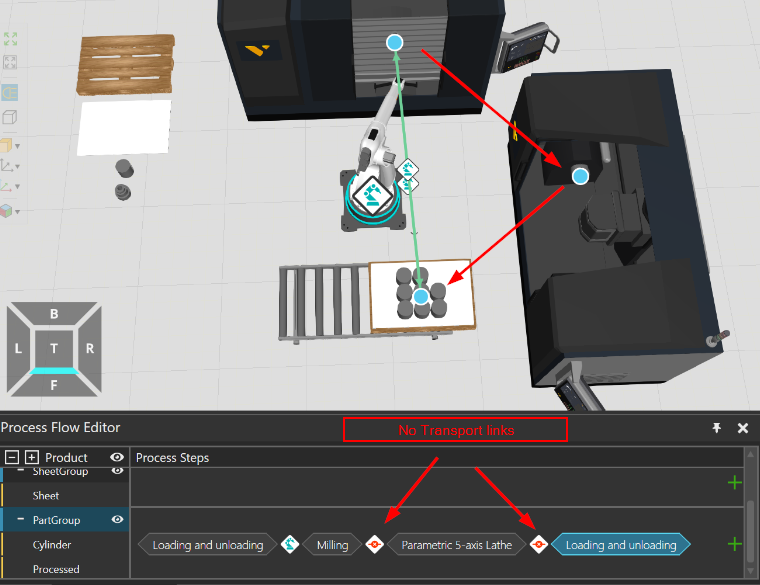
Your flow editor shows with red that there are missing steps between your processes.
You need to add the transport links between Milling- Paramteric Lathe - Loading.